
Vim 簡介{#vim-簡介} Vim 是 Linux 系統上的最著名的文本/ 代碼編輯器,也是早年的 Vi編輯器的加強版,而 gVim 則是其 Windows 版。它的最大特色是完全使用鍵盤命令進行編輯,脫離了滑鼠操作雖然使得入門變得困難,但上手之後鍵盤流的各種巧妙組合操作卻能帶來極為大幅的效率提 ...
有手就行的ESP32-CAM監控教程
01、簡介
基於esp32-cam的一個小東西。花了很多時間在網上找教程,發現基本都是使用的arduino實現的,但是使用arduino下載開發板就沒成功過[流淚] [流淚];於是找到一個替代的工具 -- 簡單,快捷(vscode)。
02、準備
-
開發環境安裝
- 安裝vscode
- vscode中安裝platformio插件
-
材料
- esp32-cam開發板
- USB TO TTL 下載器
- 杜邦線一根
-
接線
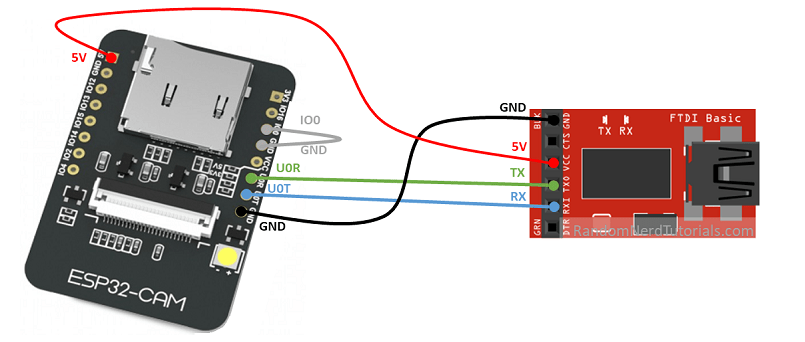
03、配置項目
當platformio插件安裝成功後,左側出現一個螞蟻頭像。
- 創建項目選擇 ->
AI Thinker ESP32-CAM板子; Framework ->Arduino - 下載
https://github.com/arkhipenko/esp32-cam-mjpeg開源項目 - 目錄結構(修改)
- lib
- OV2640
- OV2640.cpp
- OV2640.h
- OV2640
- src
- camera_pins.h
- home_wifi_multi.h
- main.cpp
- platformio.ini
- lib
04、源代碼
- OV2640.cpp
#include "OV2640.h"
#define TAG "OV2640"
// definitions appropriate for the ESP32-CAM devboard (and most clones)
camera_config_t esp32cam_config{
.pin_pwdn = -1, // FIXME: on the TTGO T-Journal I think this is GPIO 0
.pin_reset = 15,
.pin_xclk = 27,
.pin_sscb_sda = 25,
.pin_sscb_scl = 23,
.pin_d7 = 19,
.pin_d6 = 36,
.pin_d5 = 18,
.pin_d4 = 39,
.pin_d3 = 5,
.pin_d2 = 34,
.pin_d1 = 35,
.pin_d0 = 17,
.pin_vsync = 22,
.pin_href = 26,
.pin_pclk = 21,
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_JPEG,
// .frame_size = FRAMESIZE_UXGA, // needs 234K of framebuffer space
// .frame_size = FRAMESIZE_SXGA, // needs 160K for framebuffer
// .frame_size = FRAMESIZE_XGA, // needs 96K or even smaller FRAMESIZE_SVGA - can work if using only 1 fb
.frame_size = FRAMESIZE_SVGA,
.jpeg_quality = 12, //0-63 lower numbers are higher quality
.fb_count = 2 // if more than one i2s runs in continous mode. Use only with jpeg
};
camera_config_t esp32cam_aithinker_config{
.pin_pwdn = 32,
.pin_reset = -1,
.pin_xclk = 0,
.pin_sscb_sda = 26,
.pin_sscb_scl = 27,
// Note: LED GPIO is apparently 4 not sure where that goes
// per https://github.com/donny681/ESP32_CAMERA_QR/blob/e4ef44549876457cd841f33a0892c82a71f35358/main/led.c
.pin_d7 = 35,
.pin_d6 = 34,
.pin_d5 = 39,
.pin_d4 = 36,
.pin_d3 = 21,
.pin_d2 = 19,
.pin_d1 = 18,
.pin_d0 = 5,
.pin_vsync = 25,
.pin_href = 23,
.pin_pclk = 22,
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_1,
.ledc_channel = LEDC_CHANNEL_1,
.pixel_format = PIXFORMAT_JPEG,
// .frame_size = FRAMESIZE_UXGA, // needs 234K of framebuffer space
// .frame_size = FRAMESIZE_SXGA, // needs 160K for framebuffer
// .frame_size = FRAMESIZE_XGA, // needs 96K or even smaller FRAMESIZE_SVGA - can work if using only 1 fb
.frame_size = FRAMESIZE_SVGA,
.jpeg_quality = 12, //0-63 lower numbers are higher quality
.fb_count = 2 // if more than one i2s runs in continous mode. Use only with jpeg
};
camera_config_t esp32cam_ttgo_t_config{
.pin_pwdn = 26,
.pin_reset = -1,
.pin_xclk = 32,
.pin_sscb_sda = 13,
.pin_sscb_scl = 12,
.pin_d7 = 39,
.pin_d6 = 36,
.pin_d5 = 23,
.pin_d4 = 18,
.pin_d3 = 15,
.pin_d2 = 4,
.pin_d1 = 14,
.pin_d0 = 5,
.pin_vsync = 27,
.pin_href = 25,
.pin_pclk = 19,
.xclk_freq_hz = 20000000,
.ledc_timer = LEDC_TIMER_0,
.ledc_channel = LEDC_CHANNEL_0,
.pixel_format = PIXFORMAT_JPEG,
.frame_size = FRAMESIZE_SVGA,
.jpeg_quality = 12, //0-63 lower numbers are higher quality
.fb_count = 2 // if more than one i2s runs in continous mode. Use only with jpeg
};
void OV2640::run(void)
{
if (fb)
//return the frame buffer back to the driver for reuse
esp_camera_fb_return(fb);
fb = esp_camera_fb_get();
}
void OV2640::runIfNeeded(void)
{
if (!fb)
run();
}
int OV2640::getWidth(void)
{
runIfNeeded();
return fb->width;
}
int OV2640::getHeight(void)
{
runIfNeeded();
return fb->height;
}
size_t OV2640::getSize(void)
{
runIfNeeded();
if (!fb)
return 0; // FIXME - this shouldn't be possible but apparently the new cam board returns null sometimes?
return fb->len;
}
uint8_t *OV2640::getfb(void)
{
runIfNeeded();
if (!fb)
return NULL; // FIXME - this shouldn't be possible but apparently the new cam board returns null sometimes?
return fb->buf;
}
framesize_t OV2640::getFrameSize(void)
{
return _cam_config.frame_size;
}
void OV2640::setFrameSize(framesize_t size)
{
_cam_config.frame_size = size;
}
pixformat_t OV2640::getPixelFormat(void)
{
return _cam_config.pixel_format;
}
void OV2640::setPixelFormat(pixformat_t format)
{
switch (format)
{
case PIXFORMAT_RGB565:
case PIXFORMAT_YUV422:
case PIXFORMAT_GRAYSCALE:
case PIXFORMAT_JPEG:
_cam_config.pixel_format = format;
break;
default:
_cam_config.pixel_format = PIXFORMAT_GRAYSCALE;
break;
}
}
esp_err_t OV2640::init(camera_config_t config)
{
memset(&_cam_config, 0, sizeof(_cam_config));
memcpy(&_cam_config, &config, sizeof(config));
esp_err_t err = esp_camera_init(&_cam_config);
if (err != ESP_OK)
{
printf("Camera probe failed with error 0x%x", err);
return err;
}
// ESP_ERROR_CHECK(gpio_install_isr_service(0));
return ESP_OK;
}
- OV2640.h
#ifndef OV2640_H_
#define OV2640_H_
#include <Arduino.h>
#include <pgmspace.h>
#include <stdio.h>
#include "esp_log.h"
#include "esp_attr.h"
#include "esp_camera.h"
extern camera_config_t esp32cam_config, esp32cam_aithinker_config, esp32cam_ttgo_t_config;
class OV2640
{
public:
OV2640(){
fb = NULL;
};
~OV2640(){
};
esp_err_t init(camera_config_t config);
void run(void);
size_t getSize(void);
uint8_t *getfb(void);
int getWidth(void);
int getHeight(void);
framesize_t getFrameSize(void);
pixformat_t getPixelFormat(void);
void setFrameSize(framesize_t size);
void setPixelFormat(pixformat_t format);
private:
void runIfNeeded(); // grab a frame if we don't already have one
// camera_framesize_t _frame_size;
// camera_pixelformat_t _pixel_format;
camera_config_t _cam_config;
camera_fb_t *fb;
};
#endif //OV2640_H_
- camera_pins.h
#if defined(CAMERA_MODEL_WROVER_KIT)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 21
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 19
#define Y4_GPIO_NUM 18
#define Y3_GPIO_NUM 5
#define Y2_GPIO_NUM 4
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#elif defined(CAMERA_MODEL_ESP_EYE)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 4
#define SIOD_GPIO_NUM 18
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 36
#define Y8_GPIO_NUM 37
#define Y7_GPIO_NUM 38
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 35
#define Y4_GPIO_NUM 14
#define Y3_GPIO_NUM 13
#define Y2_GPIO_NUM 34
#define VSYNC_GPIO_NUM 5
#define HREF_GPIO_NUM 27
#define PCLK_GPIO_NUM 25
#elif defined(CAMERA_MODEL_M5STACK_PSRAM)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 25
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 32
#define VSYNC_GPIO_NUM 22
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#elif defined(CAMERA_MODEL_M5STACK_WIDE)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 22
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 32
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#elif defined(CAMERA_MODEL_AI_THINKER)
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#else
#error "Camera model not selected"
#endif
- home_wifi_multi.h
#define SSID1 "wifi名稱"
#define PWD1 "wifi密碼"
- main.cpp
#include <Arduino.h>
#include "OV2640.h"
#include <WiFi.h>
#include <WebServer.h>
#include <WiFiClient.h>
// 源碼: https://github.com/arkhipenko/esp32-cam-mjpeg
// Select camera model
//#define CAMERA_MODEL_WROVER_KIT
// #define CAMERA_MODEL_ESP_EYE
//#define CAMERA_MODEL_M5STACK_PSRAM
//#define CAMERA_MODEL_M5STACK_WIDE
#define CAMERA_MODEL_AI_THINKER
#include "camera_pins.h"
/*
Next one is an include with wifi credentials.
This is what you need to do:
1. Create a file called "home_wifi_multi.h" in the same folder OR under a separate subfolder of the "libraries" folder of Arduino IDE. (You are creating a "fake" library really - I called it "MySettings").
2. Place the following text in the file:
#define SSID1 "replace with your wifi ssid"
#define PWD1 "replace your wifi password"
3. Save.
Should work then
*/
#include "home_wifi_multi.h"
OV2640 cam;
WebServer server(80);
const char HEADER[] = "HTTP/1.1 200 OK\r\n" \
"Access-Control-Allow-Origin: *\r\n" \
"Content-Type: multipart/x-mixed-replace; boundary=123456789000000000000987654321\r\n";
const char BOUNDARY[] = "\r\n--123456789000000000000987654321\r\n";
const char CTNTTYPE[] = "Content-Type: image/jpeg\r\nContent-Length: ";
const int hdrLen = strlen(HEADER);
const int bdrLen = strlen(BOUNDARY);
const int cntLen = strlen(CTNTTYPE);
void handle_jpg_stream(void)
{
char buf[32];
int s;
WiFiClient client = server.client();
client.write(HEADER, hdrLen);
client.write(BOUNDARY, bdrLen);
while (true)
{
if (!client.connected()) break;
cam.run();
s = cam.getSize();
client.write(CTNTTYPE, cntLen);
sprintf( buf, "%d\r\n\r\n", s );
client.write(buf, strlen(buf));
client.write((char *)cam.getfb(), s);
client.write(BOUNDARY, bdrLen);
}
}
const char JHEADER[] = "HTTP/1.1 200 OK\r\n" \
"Content-disposition: inline; filename=capture.jpg\r\n" \
"Content-type: image/jpeg\r\n\r\n";
const int jhdLen = strlen(JHEADER);
void handle_jpg(void)
{
WiFiClient client = server.client();
if (!client.connected()) return;
cam.run();
client.write(JHEADER, jhdLen);
client.write((char *)cam.getfb(), cam.getSize());
}
void handleNotFound()
{
String message = "Server is running!\n\n";
message += "URI: ";
message += server.uri();
message += "\nMethod: ";
message += (server.method() == HTTP_GET) ? "GET" : "POST";
message += "\nArguments: ";
message += server.args();
message += "\n";
server.send(200, "text / plain", message);
}
void setup()
{
Serial.begin(115200);
//while (!Serial); //wait for serial connection.
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
// Frame parameters
// config.frame_size = FRAMESIZE_UXGA;
config.frame_size = FRAMESIZE_QVGA;
config.jpeg_quality = 12;
config.fb_count = 2;
#if defined(CAMERA_MODEL_ESP_EYE)
pinMode(13, INPUT_PULLUP);
pinMode(14, INPUT_PULLUP);
#endif
cam.init(config);
IPAddress ip;
WiFi.mode(WIFI_STA);
WiFi.begin(SSID1, PWD1);
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
Serial.print(F("."));
}
ip = WiFi.localIP();
Serial.println(F("WiFi connected"));
Serial.println("");
Serial.println(ip);
Serial.print("Stream Link: http://");
Serial.print(ip);
Serial.println("/mjpeg/1");
server.on("/mjpeg/1", HTTP_GET, handle_jpg_stream);
server.on("/jpg", HTTP_GET, handle_jpg);
server.onNotFound(handleNotFound);
server.begin();
}
void loop()
{
server.handleClient();
}
- platformio.ini
[env:esp32cam]
platform = espressif32
board = esp32cam
framework = arduino
monitor_speed = 115200
upload_port = /dev/ttyUSB0
05、使用串口調試工具
作者的是linux系統,使用的是CuteCom 。當燒錄成功後,去掉下拉線 重啟開發板。串口工具界面出現鏈接 Stream Link: http://192.168.50.67/mjpeg/1 使用瀏覽器打開。
註意
PC需要與開發板連接同一wifi。非常非常重要 ---> esp32開發板在下載程式時需要下拉引腳IO0(使用杜邦線連接GND和IO0),然後再重啟開發板。當運行程式時,不能下拉引腳,然後再重啟開發板。


