
摘要 通過前面一系列的鋪墊,相信大家對整個miiboo機器人的DIY有了一個清晰整體的認識。接下來就正式進入機器人大腦(嵌入式主板:樹莓派3)的開發。本章將從樹莓派3的開發環境搭建入手,為後續ros開發、slam導航及語音交互演算法做準備。本章內容: 1.安裝系統ubuntu_mate_16.04 2 ...
摘要
通過前面一系列的鋪墊,相信大家對整個miiboo機器人的DIY有了一個清晰整體的認識。接下來就正式進入機器人大腦(嵌入式主板:樹莓派3)的開發。本章將從樹莓派3的開發環境搭建入手,為後續ros開發、slam導航及語音交互演算法做準備。本章內容:
1.安裝系統ubuntu_mate_16.04
安裝前先準備好需要用到的材料,在樹莓派3上安裝ubuntu_mate_16.04需要用到的工具和材料,如圖1。
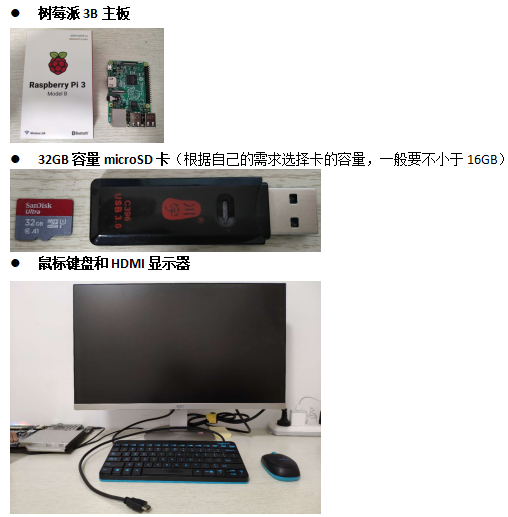
(圖1)材料準備
1.1.格式化microSD卡
在向microSD卡燒入系統之前,需要先格式化好microSD卡。我這裡使用DiskGenius工具將卡格式化為FAT32文件系統。DiskGenius下載地址:
http://www.diskgenius.cn/download.php
1.2.下載ubuntu-mate-16.04系統鏡像
直接前往ubuntu-mate的官網https://ubuntu-mate.org/download/。選擇如圖2所示的版本進行下載就行了。

(圖2)ubuntu-mate-16.04下載頁面
1.3.系統燒錄
將下載好的系統鏡像文件ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img.xz解壓得到ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img,該文件應存放在英文路徑下。然後用Win32 Disk Imager工具將ubuntu-mate-16.04.2-desktop-armhf-raspberry-pi.img燒錄到microSD卡,Win32 Disk Imager工具下載地址https://win32-disk-imager.en.lo4d.com/download。燒錄過程很簡單,打開Win32 Disk Imager工具,在[映像文件]欄中填入待燒錄的鏡像文件路徑,在[設備]欄中填入要燒錄的microSD卡,最後點擊[寫入]等待燒錄進度完成就行了,如圖3。

(圖3)系統燒錄
1.4.上電開機
給樹莓派3主板連接上HDMI顯示器、滑鼠、鍵盤,並插入剛剛燒錄好系統的microSD卡,就可以上電了,如圖4。

(圖4)上電開機
第一次開機,系統需要用戶填寫一些必要的設置項,首先是系統語言設置,選擇預設的語言English就行了,如圖5。

(圖5)語言設置
然後是wifi連接設置,這裡選擇先不聯網,這樣系統配置速度會快很多,等後面我們再進行聯網,如圖6。

(圖6)wifi連接設置
然後是時區設置,我們在中國,說以用滑鼠點擊地圖中的中國區域,會自動鎖定到Shanghai時區,如圖7。

(圖7)時區設置
然後是鍵盤設置,直接預設就行了,如圖8。
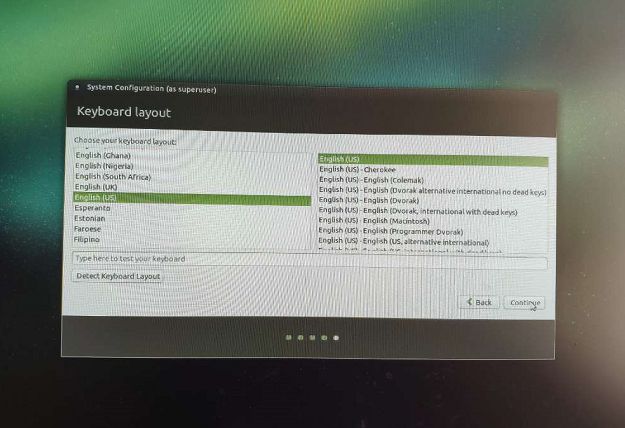
(圖8)鍵盤設置
然後是用戶名和密碼設置,為了方便記憶,我將用戶名和密碼都設置成了ubuntu;這裡需要特別註意,由於我們的系統用於機器人的開發,為了讓機器人上電就能自動進入系統,我們需要勾選[Log in automatically]選項,也就是讓系統開機自動登錄。如圖9。

(圖9)用戶名、密碼、開機自動登錄設置
然後就進入系統配置過程了,耐心等待配置進度條完成,如圖10。
(圖10)系統配置過程
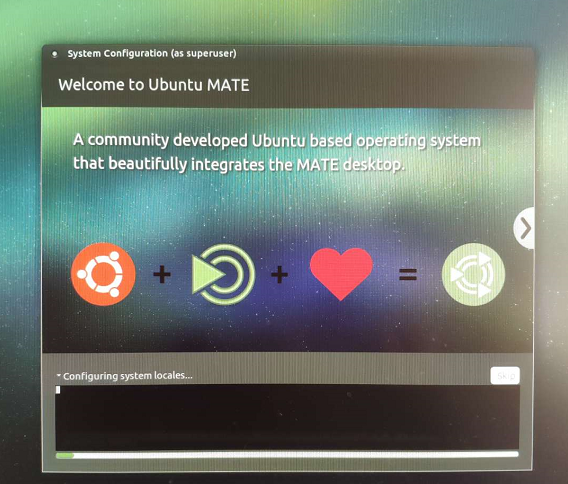
耐心等待,所有配置完成後,系統會自動重啟一次,重啟完成後,就可以看到ubuntu-mate-16.04系統的真容了,如圖11。如果我們不想每次開機都看到這個歡迎界面,可以去掉勾選框中的勾,關閉就行了,下次就不會出現了。

(圖11)歡迎界面
最後,就可以見到ubuntu-mate-16.04系統的真容了,如圖12,到這裡系統安裝就成功了。

(圖12)ubuntu-mate-16.04系統桌面
後記
如果大家對博文的相關類容感興趣,或有什麼技術疑問,歡迎加入下麵的《SLAM+語音機器人DIY》QQ技術交流群,一起討論學習^_^


