
摘要 通過前面一系列的鋪墊,相信大家對整個miiboo機器人的DIY有了一個清晰整體的認識。接下來就正式進入機器人大腦(嵌入式主板:樹莓派3)的開發。本章將從樹莓派3的開發環境搭建入手,為後續ros開發、slam導航及語音交互演算法做準備。本章內容: 1.安裝系統ubuntu_mate_16.04 2 ...
摘要
通過前面一系列的鋪墊,相信大家對整個miiboo機器人的DIY有了一個清晰整體的認識。接下來就正式進入機器人大腦(嵌入式主板:樹莓派3)的開發。本章將從樹莓派3的開發環境搭建入手,為後續ros開發、slam導航及語音交互演算法做準備。本章內容:
2.安裝ros-kinetic
安裝好系統ubuntu-mate-16.04後,就可以安裝對於我們機器人開發非常重要的ROS系統了,根據ubuntu的版本與ROS行版本之間的對於關係,這裡我們安裝ros-kinetic這個發行版。
2.1.連接wifi網路
由於安裝需要通過網路線上進行,所以需要先連接上wifi,在桌面右上角找到wifi樣式的圖標,在下拉欄中選擇[Edit Connections…],如圖13。

(圖13)編輯網路連接
在彈出來的視窗中,點擊[Add]來添加我們的網路連接,並選擇[Wi-Fi]連接類型,最後點擊[Create…]來創建,如圖14。

(圖14)創建網路連接
在網路連接的配置視窗中,首先設置[General]參數,為了讓系統開機自啟動後能自動連接該網路,勾選前兩項,如圖15。
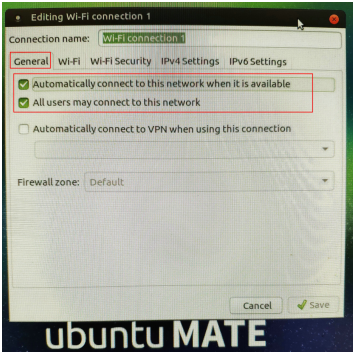
(圖15)網路連接General參數
然後設置[Wi-Fi]參數,SSID欄填入自己家wifi的名字(我家的wifi名字叫error),Mode欄選擇Client,Device欄下拉填入自己的無線網卡號,如圖16。
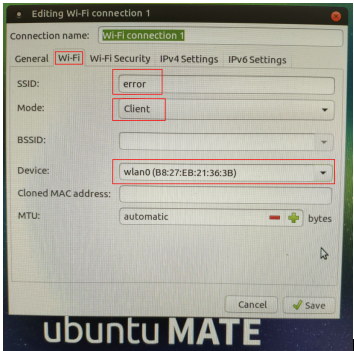
(圖16)網路連接Wi-Fi參數
然後設置[Wi-Fi Security]參數,Security欄填入自己家wifi的加密方式(一般的加密方式都是WPA&WPA2 Personal),Password欄填入wifi的連接密碼,最後點擊[save]保存設置好的參數,如圖17。

(圖17)網路連接Wi-Fi Security參數
最後找到[Enable Networking]選項,去掉選項前面的勾,然後再勾上,讓網路配置生效;稍等片刻,我們配置的wifi連接error將自動連接上,這樣就連接網路完成了,如圖18。
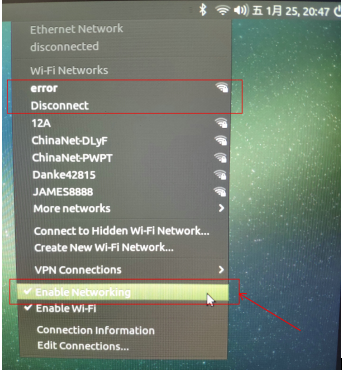
(圖18)重啟網路使網路配置生效
為了讓機器人啟動後,我們能通過網路遠程訪問,這裡建議大家在樹莓派上設置成靜態IP分配,首先打開命令行終端用ifconfig查看一下當前分配給樹莓派的IP地址,將這個IP地址綁定成靜態IP,這樣可以保證該IP不會與其他設備發生IP衝突,如圖19。

(圖19)查看IP地址
然後,對上面創建的網路連接的[IPv4 Settings]參數進行設置,Method欄選擇Manual,Addresses欄填入靜態IP參數(靜態IP設為192.168.0.117,子網掩碼設為255.255.255.0,網關設為192.168.0.1),DNS servers欄填入192.168.0.1,最後保存就行了,只需要重啟網路靜態IP就設好了,如圖20。
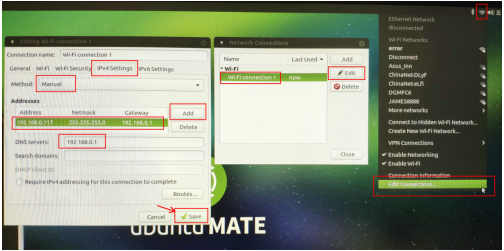
(圖20)設置靜態IP
2.2.安裝ros-kinetic
其實在ubuntu上安裝ROS,有很詳細的ROS官方教程,感興趣的朋友可以直接參考官方教程http://wiki.ros.org/kinetic/Installation/Ubuntu。由於官方教程用英文書寫,為了方便大家閱讀,我將官方教程翻譯過來,方便大家學習,下麵正式進入安裝。溫馨提醒,由於不同的編輯器對過長的句子換行的規則不同,下麵的命令被自動換行後可能影響正常的閱讀,請直接參閱官方教程中的命令http://wiki.ros.org/kinetic/Installation/Ubuntu。
(1)設置ubuntu的sources.list
打開命令行終端,輸入如下命令:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
(2)設置keys
打開命令行終端,輸入如下命令:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
(3)安裝ros-kinetic-desktop-full完整版
打開命令行終端,分別輸入如下兩條命令:
sudo apt-get update sudo apt-get install ros-kinetic-desktop-full
小技巧,如果安裝過程提示“下載錯誤”,請耐心重試上面的兩條命令,這個錯誤多半是由於網路故障造成的。
(4)初始化rosdep
打開命令行終端,分別輸入如下兩條命令:
sudo rosdep init rosdep update
(5)配置環境變數
打開命令行終端,分別輸入如下兩條命令:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc source ~/.bashrc
(6)安裝rosinstall
打開命令行終端,輸入如下命令:
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential
(7)測試ros安裝成功與否
打開命令行終端,輸入如下命令:
roscore
如果此時出現以下內容
setting /run_id to 4cb2a932-06c0-11e9-9ff2-000c2985f3ab process[rosout-1]: started with pid [38686] started core service [/rosout]
那麼恭喜你,ROS已經成功的安裝上了!!!
後記
如果大家對博文的相關類容感興趣,或有什麼技術疑問,歡迎加入下麵的《SLAM+語音機器人DIY》QQ技術交流群,一起討論學習^_^



