
教研室新進機器人,組內成員需要對其做一下必要的瞭解。手冊純英文內容多,這裡挑重點介紹幾條: 感測器: 作為輸入設備,Tiago對周圍環境感知完全通過各種感測器實現。配備的感測器有以下幾種: 1,激光測距儀:0.05-10m 15Hz 2,聲吶:0.03-1m 40kHz 3,慣性測量感測器:MPU ...

教研室新進機器人,組內成員需要對其做一下必要的瞭解。手冊純英文內容多,這裡挑重點介紹幾條:
感測器:
作為輸入設備,Tiago對周圍環境感知完全通過各種感測器實現。配備的感測器有以下幾種:
1,激光測距儀:0.05-10m 15Hz
2,聲吶:0.03-1m 40kHz
3,慣性測量感測器:MPU 6050
4,立體聲麥克風
5,電機電流反饋感測器
6,扭矩感測器
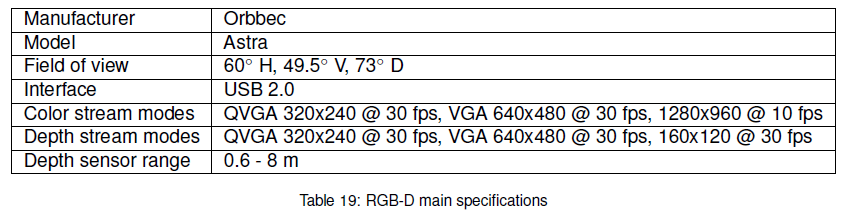
7,RGB-D 深度攝像機
移動基座:
TIAGo的移動基座配有差分驅動機構,包含板載電腦,電池,電源連接器,激光測距儀,三個後置聲納,用戶面板,服務面板和兩個WiFi網路,以確保無線連接。
此外,帶有擴展塢的TIAGo版本在前面有一個充電板。
重要物理參數:
機械臂最大負重2kg,手指承重1kg(重點標註,超重損壞機器人!很難修的!)
軀幹高度:110cm-145cm
最大移動速度:1m/s
頭部:
TIAGo的頭部配有俯仰電機,即2個DoF,並配有立體聲麥克風,揚聲器和RGB-D相機。 此外,在頭部的頂部有一個帶有安裝點的平坦錶面,以允許用戶添加新的感測器或設備。
註意,添加新設備時,頭部有效載荷為0.5 kg。 圖18示出了俯仰機構的每個部件和兩個接頭的位置。
由於本實驗室主要方向為電腦視覺,所以RGBD camera詳細參數貼一下
開發電腦系統安裝:
使用Tiago提供的USB驅動安裝,創建以下幾個預設用戶:
root 密碼palroot
pal 密碼pal
aptuser 密碼palaptuser
機器人內置電腦:
TIAGo電腦的名稱是tiago-0c,其中0需要由機器人的序列號替換。 為了清楚起見,以下我們將使用tiago-0c來指代TIAGo的電腦名稱。
鏈接機器人的ssh
ssh pal@tiago-0c
預設用戶同上。
文件系統:
TIAGo的電腦具有防止可能損壞文件系統的電源故障的保護。
為了使用文件系統作為讀寫,請執行以下操作:
root@tiago-0c:~# rw Remounting as rw... Mounting /ro as read-write Binding system files... root@tiago-0c:~# chroot /ro
rw命令將所有分區重新掛載為讀寫。 然後一個chroot到/ ro我們有與預設相同的系統,但所有可寫。 所有執行的更改都將持續。為了回到以前的狀態,請執行以下操作:
root@tiago-0c:~# exit root@tiago-0c:~# ro Remount /ro as read only Unbinding system files
第一個退出命令從chroot返回。 然後ro腳本以預設方式重新掛載分區。
內置DNS:
控制電腦具有用於具有功能變數名稱reem-lan的TIAGo的內部LAN的DNS伺服器。 該DNS伺服器由連接到LAN的所有電腦使用。
當將電腦添加到內部LAN(例如使用乙太網連接器)時,可以使用命令addLocalDns將其添加到內部DNS。(備註,暫時用不到,不展開)
開發電腦:
SDE開發電腦中使用的操作系統基於Linux Ubuntu 14.04 LTS發行版。 與此特定Linux發行版有關的任何文檔適用於SDE。 本文僅指出了PAL SDE與Ubuntu 14.04的不同之處。
配置要求:
推薦使用具有8個CPU內核的電腦。 建議使用解析度至少為1920x1080像素的強大顯卡,以便在使用可視化工具(如rviz和Gazebo模擬器)時獲得更好的用戶體驗。 開發電腦ISO提供對Nvidia卡的支持。
在升級開發電腦的內核的情況下,PAL機器人無法確保對其他顯卡的正確支持。
在開發基於ROS的機器人應用程式時,通常將機器人的電腦上運行的rosmater和運行ROS節點的開發電腦連接到機器人的rosmaster。 這是通過在運行ROS節點的開發電腦的每個終端設置以下環境變數來實現的:
export ROS_MASTER_URI=http://tiago-0c:11311
請註意,為了在不同的電腦之間成功交換ROS消息,他們中的每一個都需要能夠解析其他電腦的主機名。 這意味著機器人電腦需要能夠解析任何開發電腦的主機名,反之亦然。
否則,ROS消息將無法正確交換,並會發生意外行為。在開始使用運行指向機器人的rosmaster的ROS節點的開發電腦之前,請執行以下檢查:
ping tiago-0c
確保ping命令到達機器人的電腦。 然後從機器人做同樣的事情:
ssh pal@tiago-0c
ping devel_computer_hostname
如果ping未到達開發電腦,則繼續將主機名添加到機器人的本地DNS。 否則,您可以導出環境變數ROS_IP - 從機器人可見的開發電腦的IP。
例如,如果將機器人設置為接入點,並且開發電腦連接到它,並且已經給出了IP 10.68.0.128(使用ifconfig來計算出),則在用於與機器人通信的所有終端中使用以下命令:
export ROS_MASTER_URI=http://tiago-0c:11311
export ROS_IP=10.68.0.128
所發送的所有ROS命令將使用電腦的IP而不是主機名。
可以看出,有兩個主要的軟體塊:操作系統是Ubuntu,具有實時內核補丁Xenomai,以及基於Orocos的機器人中間件,用於實時,安全的進程間通信。


