
STM32 HAL庫 +freeRTOS+Keil 移植 官方freeRTOS移植教程很多,本文不做贅述。本文基於Keil 5提供的freeRTOS庫,進行移植。 Keil 版本:Keil MDK uVision5 首先準備好一個可以用的HAL庫工程,為了方便調試,選擇了原子哥的開發板上提供跑馬燈工 ...
STM32 HAL庫 +freeRTOS+Keil 移植
官方freeRTOS移植教程很多,本文不做贅述。本文基於Keil 5提供的freeRTOS庫,進行移植。
Keil 版本:Keil MDK uVision5
首先準備好一個可以用的HAL庫工程,為了方便調試,選擇了原子哥的開發板上提供跑馬燈工程。
打開工程,
點擊 ,下載freeRTOS庫,
,下載freeRTOS庫,

我的已經安裝過了 最新的版本10.3.1

下載完成後關閉,點擊 ,在這個界面下,按下圖選擇對應的選項
,在這個界面下,按下圖選擇對應的選項
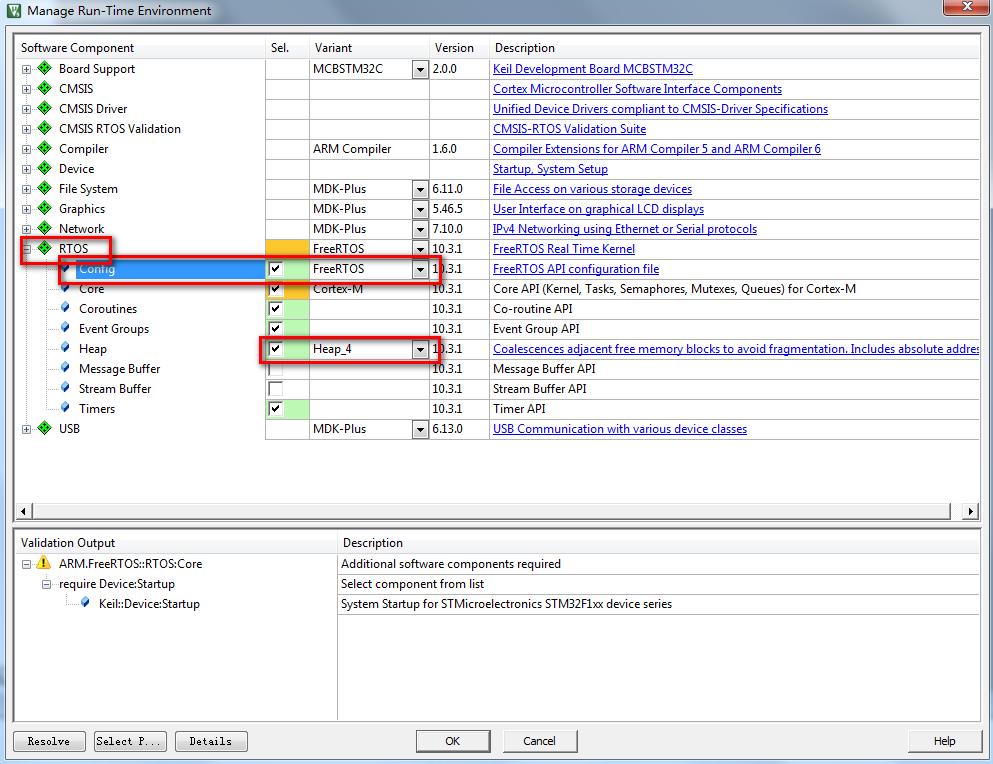
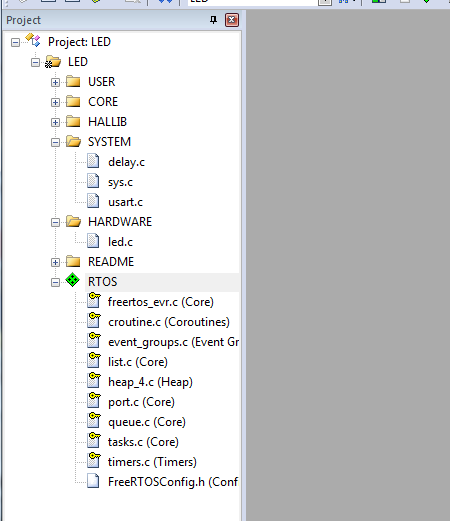
選擇完成後點擊OK( 如果沒有先下載),可以看到工程中已經添加RTOS
點擊 編譯下,
編譯下,

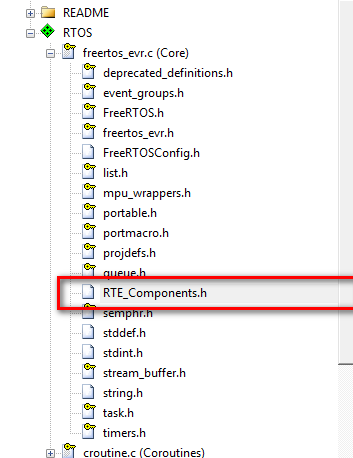
有一個錯誤先不用管,接下來開始修改文件,先打開RTE_Components.h
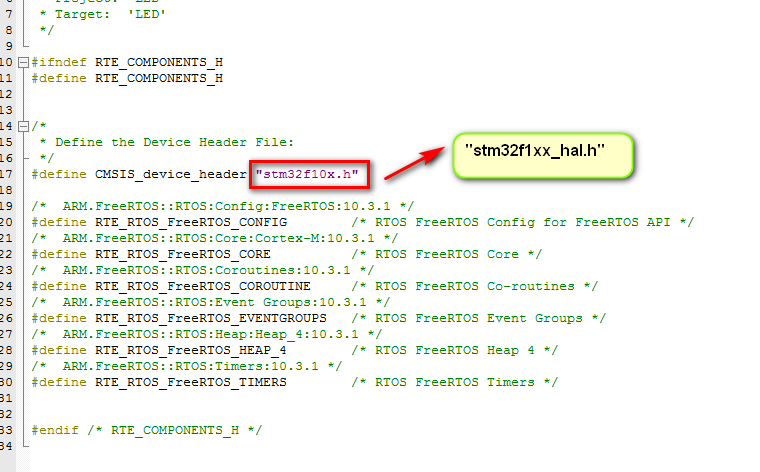
將 #define CMSIS_device_header "stm32f10x.h" 修改成 #define CMSIS_device_header "stm32f1xx_hal.h" ,keil下載的預設是庫函數版移植的,需要將頭文件變更成"stm32f1xx_hal.h"
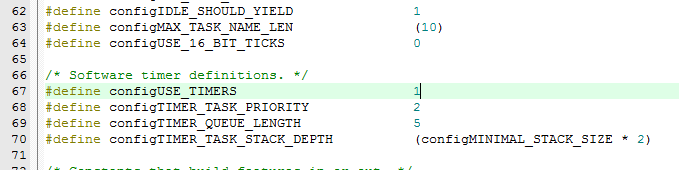
接下來修改FREERTOS_CONFIG.H,打開頭文件FREERTOS_CONFIG.H,
將#define configUSE_TIMERS 0 修改成 #define configUSE_TIMERS 1
將#define xPortSysTickHandler SysTick_Handler 屏蔽

編譯下,出現兩個錯誤
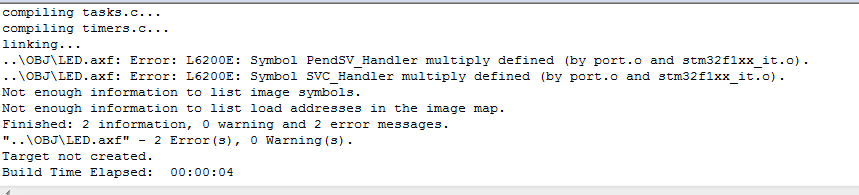
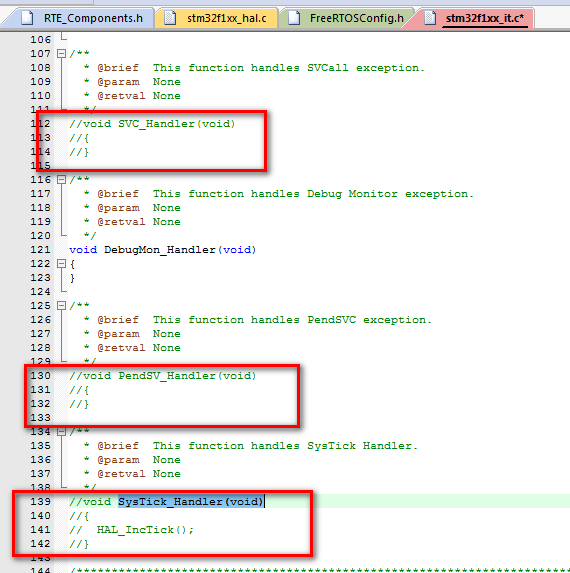
打開 stm32f1xx_it.c,
將PendSV_Handler(void) 、SVC_Handler(void)、SysTick_Handler(void)3個函數 屏蔽
打開sys.h 將 #define SYSTEM_SUPPORT_OS 0 改成#define SYSTEM_SUPPORT_OS 1

打開delay.c 將內部所有代碼替換
#include "delay.h" #include "sys.h" #include "FreeRTOS.h" #include "task.h" static u32 fac_us=0; //us延時倍乘數 static u16 fac_ms=0; //ms延時倍乘數,在os下,代表每個節拍的ms數 extern void xPortSysTickHandler(void); //systick中斷服務函數,使用ucos時用到 void SysTick_Handler(void) { if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系統已經運行 { xPortSysTickHandler(); } HAL_IncTick(); } //初始化延遲函數 //當使用ucos的時候,此函數會初始化ucos的時鐘節拍 //SYSTICK的時鐘固定為AHB時鐘 //SYSCLK:系統時鐘頻率 void delay_init(u8 SYSCLK) { u32 reload; HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK);//SysTick頻率為HCLK fac_us=SYSCLK; //不論是否使用OS,fac_us都需要使用 reload=SYSCLK; //每秒鐘的計數次數 單位為K reload*=1000000/configTICK_RATE_HZ; //根據delay_ostickspersec設定溢出時間 //reload為24位寄存器,最大值:16777216,在72M下,約合0.233s左右 fac_ms=1000/configTICK_RATE_HZ; //代表OS可以延時的最少單位 SysTick->CTRL|=SysTick_CTRL_TICKINT_Msk;//開啟SYSTICK中斷 SysTick->LOAD=reload; //每1/OS_TICKS_PER_SEC秒中斷一次 SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk; //開啟SYSTICK } //延時nus //nus:要延時的us數. //nus:0~190887435(最大值即2^32/fac_us@fac_us=22.5) void delay_us(u32 nus) { u32 ticks; u32 told,tnow,tcnt=0; u32 reload=SysTick->LOAD; //LOAD的值 ticks=nus*fac_us; //需要的節拍數 told=SysTick->VAL; //剛進入時的計數器值 while(1) { tnow=SysTick->VAL; if(tnow!=told) { if(tnow<told)tcnt+=told-tnow; //這裡註意一下SYSTICK是一個遞減的計數器就可以了. else tcnt+=reload-tnow+told; told=tnow; if(tcnt>=ticks)break; //時間超過/等於要延遲的時間,則退出. } }; } //延時nms //nms:要延時的ms數 //nms:0~65535 void delay_ms(u32 nms) { if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系統已經運行 { if(nms>=fac_ms) //延時的時間大於OS的最少時間周期 { vTaskDelay(nms/fac_ms); //FreeRTOS延時 } nms%=fac_ms; //OS已經無法提供這麼小的延時了,採用普通方式延時 } delay_us((u32)(nms*1000)); //普通方式延時 } //延時nms,不會引起任務調度 //nms:要延時的ms數 void delay_xms(u32 nms) { u32 i; for(i=0;i<nms;i++) delay_us(1000); }
打開delay.h將內部所有代碼替換
#ifndef __DELAY_H #define __DELAY_H #include "sys.h" void delay_init(u8 SYSCLK); void delay_ms(u32 nms); void delay_us(u32 nus); void SysTick_Handler(void); void delay_xms(u32 nms); #endif
打開usart.c將代碼
#if SYSTEM_SUPPORT_OS #include "includes.h" //ucos 使用 #endif
替換成
#if SYSTEM_SUPPORT_OS #include "FreeRTOS.h" #include "task.h" #endif
將代碼段
//#if SYSTEM_SUPPORT_OS //使用OS // OSIntEnter(); //#endif
和
//#if SYSTEM_SUPPORT_OS //使用OS // OSIntExit(); //#endif
屏蔽
編譯沒有錯誤
打開main.c 將所有代碼替換成
#include "sys.h" #include "delay.h" #include "usart.h" #include "led.h" #include "FreeRTOS.h" #include "task.h" #include "FreeRTOSConfig.h" //任務優先順序 #define START_TASK_PRIO 1 //任務堆棧大小 #define START_STK_SIZE 128 //任務句柄 TaskHandle_t StartTask_Handler; //任務函數 void start_task(void *pvParameters); //任務優先順序 #define LED0_TASK_PRIO 2 //任務堆棧大小 #define LED0_STK_SIZE 20 //任務句柄 TaskHandle_t LED0Task_Handler; //任務函數 void led0_task(void *pvParameters); //任務優先順序 #define LED1_TASK_PRIO 3 //任務堆棧大小 #define LED1_STK_SIZE 20 //任務句柄 TaskHandle_t LED1Task_Handler; //任務函數 void led1_task(void *pvParameters); int main(void) { HAL_Init(); //初始化HAL庫 Stm32_Clock_Init(RCC_PLL_MUL10); //設置時鐘,72M delay_init(70); //初始化延時函數 LED_Init(); //初始化LED //創建開始任務 xTaskCreate((TaskFunction_t )start_task, //任務函數 (const char* )"start_task", //任務名稱 (uint16_t )START_STK_SIZE, //任務堆棧大小 (void* )NULL, //傳遞給任務函數的參數 (UBaseType_t )START_TASK_PRIO, //任務優先順序 (TaskHandle_t* )&StartTask_Handler); //任務句柄 vTaskStartScheduler(); //開啟任務調度 return(1); // while(1){ // PAout(6)=~PAout(6); // delay_ms(500); // PAout(7)=~PAout(7); // delay_ms(1000); // }; } void start_task(void *pvParameters) { taskENTER_CRITICAL(); //進入臨界區 //創建LED0任務 xTaskCreate((TaskFunction_t )led0_task, (const char* )"led0_task", (uint16_t )LED0_STK_SIZE, (void* )NULL, (UBaseType_t )LED0_TASK_PRIO, (TaskHandle_t* )&LED0Task_Handler); //創建LED1任務 xTaskCreate((TaskFunction_t )led1_task, (const char* )"led1_task", (uint16_t )LED1_STK_SIZE, (void* )NULL, (UBaseType_t )LED1_TASK_PRIO, (TaskHandle_t* )&LED1Task_Handler); vTaskDelete(StartTask_Handler); //刪除開始任務 taskEXIT_CRITICAL(); //退出臨界區 } //LED0任務函數 void led0_task(void *pvParameters) { while(1) { LED0=~LED0; vTaskDelay(1000); } } //LED1任務函數 void led1_task(void *pvParameters) { while(1) { LED1=~LED1; vTaskDelay(2000); } }
編譯後下載,發現沒有反應跑馬燈不亮,調試發現卡死在下麵這條指令處
/* The kernel interrupt priority should be set to the lowest priority. */ configASSERT( ucMaxPriorityValue == ( configKERNEL_INTERRUPT_PRIORITY & ucMaxPriorityValue ) );
打開"FreeRTOSConfig.h" 將下麵的代碼段屏蔽
/* Cortex-M specific definitions. */ #ifdef __NVIC_PRIO_BITS /* __NVIC_PRIO_BITS will be specified when CMSIS is being used. */ #define configPRIO_BITS __NVIC_PRIO_BITS #else /* 7 priority levels */ #define configPRIO_BITS 3 #endif
將
/* Interrupt priorities used by the kernel port layer itself. These are generic * to all Cortex-M ports, and do not rely on any particular library functions. */ #define configKERNEL_INTERRUPT_PRIORITY (configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS)) /* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!! * See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */ #define configMAX_SYSCALL_INTERRUPT_PRIORITY (configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS))
修改成
#define configKERNEL_INTERRUPT_PRIORITY 255//(configLIBRARY_LOWEST_INTERRUPT_PRIORITY << (8 - configPRIO_BITS)) /* !!!! configMAX_SYSCALL_INTERRUPT_PRIORITY must not be set to zero !!!! * See http://www.FreeRTOS.org/RTOS-Cortex-M3-M4.html. */ #define configMAX_SYSCALL_INTERRUPT_PRIORITY 191//(configLIBRARY_MAX_SYSCALL_INTERRUPT_PRIORITY << (8 - configPRIO_BITS))
編譯後下載,發現跑馬燈常亮,
調試發現代碼沒有卡死,這個問題困擾我了還久,
再次打開"FreeRTOSConfig.h" 將下麵
#define configTIMER_TASK_STACK_DEPTH (configMINIMAL_STACK_SIZE * 2)
修改成
#define configTIMER_TASK_STACK_DEPTH 256
編譯下載 ,成功了!!!
移植成功的demo文件:https://download.csdn.net/download/u012345203/12447119



