
一、前言 在實時性要求較高的場合中,CPU軟體執行的方式顯然不能滿足需求,這時需要硬體邏輯實現部分功能。要想使自定義IP核被CPU訪問,就必須帶有匯流排介面。ZYNQ採用AXI BUS實現PS和PL之間的數據交互。本文以PWM為例設計了自定義AXI匯流排IP,來演示如何靈活運用ARM+FPGA的架構。 ...
一、前言
在實時性要求較高的場合中,CPU軟體執行的方式顯然不能滿足需求,這時需要硬體邏輯實現部分功能。要想使自定義IP核被CPU訪問,就必須帶有匯流排介面。ZYNQ採用AXI BUS實現PS和PL之間的數據交互。本文以PWM為例設計了自定義AXI匯流排IP,來演示如何靈活運用ARM+FPGA的架構。
功能定義:在上一篇ZYNQ入門實例博文講解的系統中添加自定義IP核,其輸出驅動LED等實現呼吸燈效果。並且軟體通過配置寄存器方式對其進行使能、打開/關閉配置以及選擇占空比變化步長。另外,可以按鍵操作完成占空比變化步長的增減。
平臺:米聯客 MIZ702N (ZYNQ-7020)
軟體:VIVADO+SDK 2017
註:自定義IP邏輯設計採用明德揚至簡設計法
二、PWM IP設計
PWM無非就是通過控制周期脈衝信號的占空比,也就是改變高電平在一段固定周期內的持續時間來達到控制目的。脈衝周期需要一個計數器來定時,占空比由低變高和由高變低兩種模式同樣需要一個計數器來指示,因此這裡使用兩個嵌套的計數器cnt_cyc和cnt_mode。cnt_mode的加一條件除了要等待cnt_cyc計數完成,還要考慮占空比的變化。
我們可以使用下降沿位置表示占空比,位置越靠近周期值占空比越高。在模式0中下降沿位置按照步長增大直至大於等於周期值,模式1中下降沿位置則按照步長遞減直到小於步長。使用兩個信號up_stage和down_stage分別指示模式0和模式1。至於步長值,在配置有效時被更新,否則使用預設值。模塊最終的輸出信號在周期計數器小於下降沿位置為1,反之為零。設計完畢,上代碼:


1 `timescale 1ns / 1ps 2 ////////////////////////////////////////////////////////////////////////////////// 3 // Company: 4 // Engineer: 5 // 6 // Create Date: 2020/03/01 18:14:44 7 // Design Name: 8 // Module Name: pwm 9 // Project Name: 10 // Target Devices: 11 // Tool Versions: 12 // Description: 13 // 14 // Dependencies: 15 // 16 // Revision: 17 // Revision 0.01 - File Created 18 // Additional Comments: 19 // 20 ////////////////////////////////////////////////////////////////////////////////// 21 22 23 module pwm( 24 input clk,//頻率100MHz 10ns 25 input rst_n, 26 input sw_en,//輸出使能 27 input sw_set_en,//步長設定使能 28 input [10-1:0] sw_freq_step,//步長數值 29 output reg led 30 ); 31 32 parameter FREQ_STEP = 10'd100; 33 34 parameter CNT_CYC_MAX = 50000; 35 36 function integer clogb2 (input integer bit_depth); 37 begin 38 for(clogb2=0;bit_depth>0;clogb2=clogb2+1) 39 bit_depth = bit_depth >> 1; 40 end 41 endfunction 42 43 localparam CNT_CYC_WIDTH = clogb2(CNT_CYC_MAX-1); 44 45 46 reg [CNT_CYC_WIDTH-1:0] cnt_cyc=0; 47 wire add_cnt_cyc,end_cnt_cyc; 48 reg [2-1:0] cnt_mode=0; 49 wire add_cnt_mode,end_cnt_mode; 50 wire up_stage,down_stage; 51 reg [CNT_CYC_WIDTH+1-1:0] neg_loc=0; 52 reg [10-1:0] freq_step=FREQ_STEP; 53 54 55 //周期計數器 計數50ms=50*1000ns = 50000_0ns 56 always@(posedge clk)begin 57 if(~rst_n)begin 58 cnt_cyc <= 0; 59 end 60 else if(add_cnt_cyc)begin 61 if(end_cnt_cyc) 62 cnt_cyc <= 0; 63 else 64 cnt_cyc <= cnt_cyc + 1'b1; 65 end 66 end 67 68 assign add_cnt_cyc = sw_en == 1; 69 assign end_cnt_cyc = add_cnt_cyc && cnt_cyc == CNT_CYC_MAX- 1; 70 71 //模式計數器 0-占空比遞增 1-占空比遞減 72 always@(posedge clk)begin 73 if(~rst_n)begin 74 cnt_mode <= 0; 75 end 76 else if(add_cnt_mode)begin 77 if(end_cnt_mode) 78 cnt_mode <= 0; 79 else 80 cnt_mode <= cnt_mode + 1'b1; 81 end 82 end 83 84 assign add_cnt_mode = end_cnt_cyc && ((up_stage && neg_loc >= CNT_CYC_MAX) || (down_stage && neg_loc == 0)); 85 assign end_cnt_mode = add_cnt_mode && cnt_mode == 2 - 1; 86 87 88 //變化步長設定 89 always@(posedge clk)begin 90 if(~rst_n)begin 91 freq_step <= FREQ_STEP; 92 end 93 else if(sw_set_en)begin 94 if(sw_freq_step >= 1 && sw_freq_step < 2000) 95 freq_step <= sw_freq_step; 96 else 97 freq_step <= FREQ_STEP; 98 end 99 end 100 101 //脈衝下降沿對應周期計數器數值 102 always@(posedge clk)begin 103 if(~rst_n)begin 104 neg_loc <= 0; 105 end 106 else if(end_cnt_cyc)begin 107 if(up_stage )begin//占空比遞增階段 108 if(neg_loc < CNT_CYC_MAX) 109 neg_loc <= neg_loc + freq_step; 110 end 111 else if(down_stage )begin//占空比遞減階段 112 if(neg_loc < freq_step) 113 neg_loc <= 0; 114 else 115 neg_loc <= neg_loc - freq_step; 116 end 117 end 118 119 end 120 121 assign up_stage = add_cnt_cyc && cnt_mode == 0; 122 assign down_stage = add_cnt_cyc && cnt_mode == 1; 123 124 125 //輸出 126 always@(posedge clk)begin 127 if(~rst_n)begin 128 led <= 1'b0;//高電平點亮 129 end 130 else if(add_cnt_cyc && cnt_cyc < neg_loc)begin 131 led <= 1'b1; 132 end 133 else 134 led <= 1'b0; 135 end 136 137 138 139 endmodulepwm.v
VIVADO綜合、佈局佈線比較慢,且軟硬體級聯調試費時費力,所以模擬是極其重要的。編寫一個簡單的testbench,定義update_freq_step task更新步長。這裡使用System Verilog語法有一定的好處。首先單驅動信號可以統一定義為logic變數類型,其次等待時長能指定單位。
1 `timescale 1ns / 1ps 2 ////////////////////////////////////////////////////////////////////////////////// 3 // Company: 4 // Engineer: 5 // 6 // Create Date: 2020/03/01 20:49:25 7 // Design Name: 8 // Module Name: testbench 9 // Project Name: 10 // Target Devices: 11 // Tool Versions: 12 // Description: 13 // 14 // Dependencies: 15 // 16 // Revision: 17 // Revision 0.01 - File Created 18 // Additional Comments: 19 // 20 ////////////////////////////////////////////////////////////////////////////////// 21 22 23 module testbench(); 24 25 logic clk,rst_n; 26 logic sw_en,sw_set_en; 27 logic [10-1:0]sw_freq_step; 28 logic led; 29 30 parameter CYC = 10, 31 RST_TIM = 2; 32 33 defparam dut.CNT_CYC_MAX = 2000; 34 35 pwm#(.FREQ_STEP(100)) 36 dut( 37 .clk (clk) ,//頻率100MHz 10ns 38 .rst_n (rst_n) , 39 .sw_en (sw_en) ,//輸出使能 40 .sw_set_en (sw_set_en) ,//步長設定使能 41 .sw_freq_step (sw_freq_step) ,//步長數值 42 .led (led) 43 ); 44 45 initial begin 46 clk = 1; 47 forever begin 48 #(CYC/2.0); 49 clk=~clk; 50 end 51 end 52 53 initial begin 54 rst_n = 1; 55 #1; 56 rst_n = 0; 57 #(RST_TIM*CYC) rst_n = 1; 58 end 59 60 initial begin 61 sw_en = 0; 62 sw_set_en = 0; 63 sw_freq_step = 'd10; 64 #1; 65 #(RST_TIM*CYC); 66 #(CYC*10); 67 sw_en = 1; 68 69 #600us; 70 update_freq_step(50); 71 #600us; 72 $stop; 73 74 end 75 76 task update_freq_step([10-1:0] freq_step); 77 sw_set_en = 1; 78 sw_freq_step = freq_step; 79 #(1*CYC); 80 sw_set_en = 0; 81 endtask 82 83 endmoduletestbench.sv
設計較簡單,直接使用VIVADO模擬器觀察波形即可:
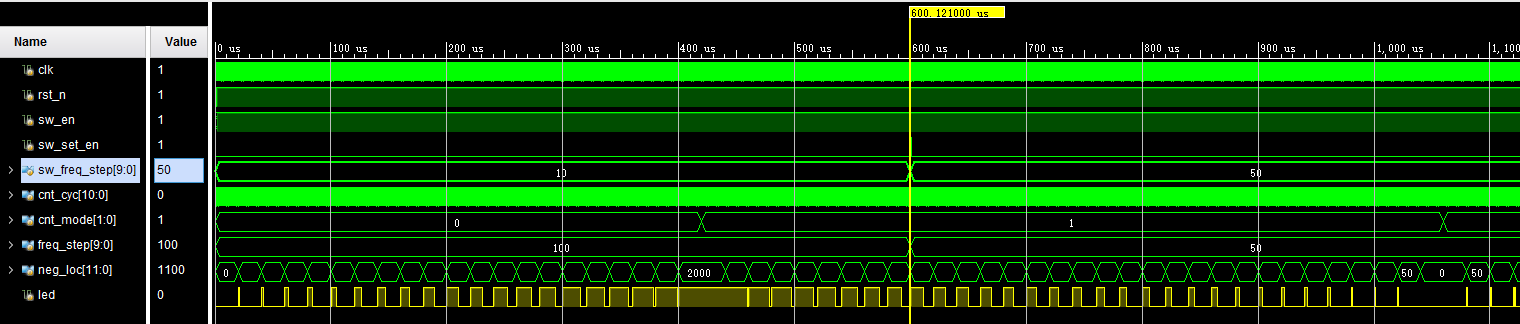
可以看到輸出信號led的占空比在不斷起伏變化,當更新freq_step為50後變化更為減慢。

配置前相鄰兩個neg_loc數值差與更新後分別是100和50。以上證明邏輯功能無誤。
三、硬體系統搭建
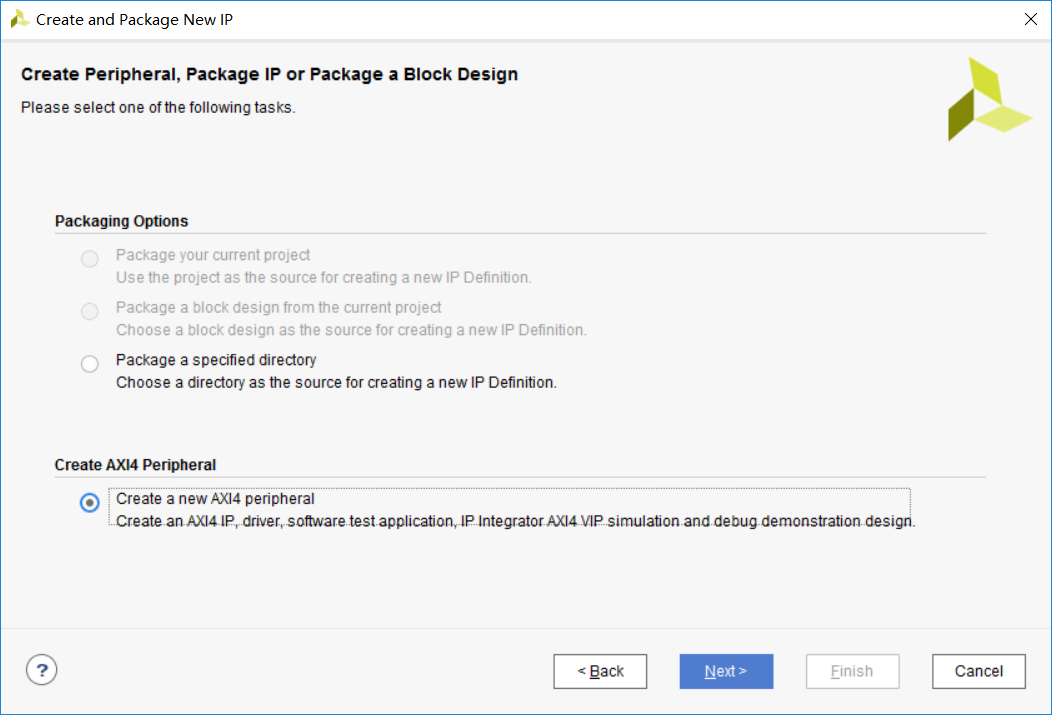
設計完PWM功能模塊還沒有完,需要再包一層匯流排Wrapper才能被CPU訪問。創建AXI匯流排IP
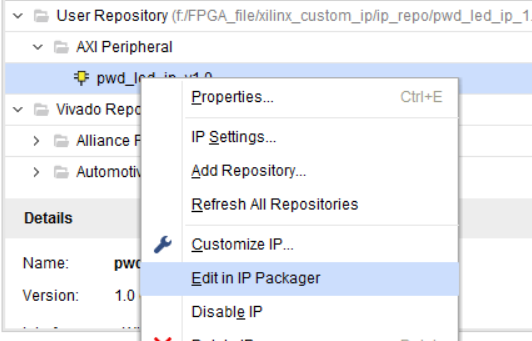
在封裝器中編輯。
最終IP結構如圖:

具體操作不過多講述,直接以代碼呈現:
1 `timescale 1 ns / 1 ps 2 3 module pwm_led_ip_v1_0 # 4 ( 5 // Users to add parameters here 6 parameter FREQ_STEP = 10'd100, 7 // User parameters ends 8 // Do not modify the parameters beyond this line 9 10 11 // Parameters of Axi Slave Bus Interface S00_AXI 12 parameter integer C_S00_AXI_DATA_WIDTH = 32, 13 parameter integer C_S00_AXI_ADDR_WIDTH = 4 14 ) 15 ( 16 // Users to add ports here 17 output led, 18 // User ports ends 19 // Do not modify the ports beyond this line 20 21 22 // Ports of Axi Slave Bus Interface S00_AXI 23 input wire s00_axi_aclk, 24 input wire s00_axi_aresetn, 25 input wire [C_S00_AXI_ADDR_WIDTH-1 : 0] s00_axi_awaddr, 26 input wire [2 : 0] s00_axi_awprot, 27 input wire s00_axi_awvalid, 28 output wire s00_axi_awready, 29 input wire [C_S00_AXI_DATA_WIDTH-1 : 0] s00_axi_wdata, 30 input wire [(C_S00_AXI_DATA_WIDTH/8)-1 : 0] s00_axi_wstrb, 31 input wire s00_axi_wvalid, 32 output wire s00_axi_wready, 33 output wire [1 : 0] s00_axi_bresp, 34 output wire s00_axi_bvalid, 35 input wire s00_axi_bready, 36 input wire [C_S00_AXI_ADDR_WIDTH-1 : 0] s00_axi_araddr, 37 input wire [2 : 0] s00_axi_arprot, 38 input wire s00_axi_arvalid, 39 output wire s00_axi_arready, 40 output wire [C_S00_AXI_DATA_WIDTH-1 : 0] s00_axi_rdata, 41 output wire [1 : 0] s00_axi_rresp, 42 output wire s00_axi_rvalid, 43 input wire s00_axi_rready 44 ); 45 // Instantiation of Axi Bus Interface S00_AXI 46 pwd_led_ip_v1_0_S00_AXI # ( 47 .C_S_AXI_DATA_WIDTH(C_S00_AXI_DATA_WIDTH), 48 .C_S_AXI_ADDR_WIDTH(C_S00_AXI_ADDR_WIDTH), 49 .FREQ_STEP(FREQ_STEP) 50 ) pwd_led_ip_v1_0_S00_AXI_inst ( 51 .S_AXI_ACLK(s00_axi_aclk), 52 .S_AXI_ARESETN(s00_axi_aresetn), 53 .S_AXI_AWADDR(s00_axi_awaddr), 54 .S_AXI_AWPROT(s00_axi_awprot), 55 .S_AXI_AWVALID(s00_axi_awvalid), 56 .S_AXI_AWREADY(s00_axi_awready), 57 .S_AXI_WDATA(s00_axi_wdata), 58 .S_AXI_WSTRB(s00_axi_wstrb), 59 .S_AXI_WVALID(s00_axi_wvalid), 60 .S_AXI_WREADY(s00_axi_wready), 61 .S_AXI_BRESP(s00_axi_bresp), 62 .S_AXI_BVALID(s00_axi_bvalid), 63 .S_AXI_BREADY(s00_axi_bready), 64 .S_AXI_ARADDR(s00_axi_araddr), 65 .S_AXI_ARPROT(s00_axi_arprot), 66 .S_AXI_ARVALID(s00_axi_arvalid), 67 .S_AXI_ARREADY(s00_axi_arready), 68 .S_AXI_RDATA(s00_axi_rdata), 69 .S_AXI_RRESP(s00_axi_rresp), 70 .S_AXI_RVALID(s00_axi_rvalid), 71 .S_AXI_RREADY(s00_axi_rready), 72 73 .led(led) 74 ); 75 76 // Add user logic here 77 78 // User logic ends 79 80 endmodulepwm_led_ip_v1_0.v
1 `timescale 1 ns / 1 ps 2 3 module pwm_led_ip_v1_0_S00_AXI # 4 ( 5 // Users to add parameters here 6 parameter FREQ_STEP = 10'd100, 7 // User parameters ends 8 // Do not modify the parameters beyond this line 9 10 // Width of S_AXI data bus 11 parameter integer C_S_AXI_DATA_WIDTH = 32, 12 // Width of S_AXI address bus 13 parameter integer C_S_AXI_ADDR_WIDTH = 4 14 ) 15 ( 16 // Users to add ports here 17 output led, 18 // User ports ends 19 // Do not modify the ports beyond this line 20 21 // Global Clock Signal 22 input wire S_AXI_ACLK, 23 // Global Reset Signal. This Signal is Active LOW 24 input wire S_AXI_ARESETN, 25 // Write address (issued by master, acceped by Slave) 26 input wire [C_S_AXI_ADDR_WIDTH-1 : 0] S_AXI_AWADDR, 27 // Write channel Protection type. This signal indicates the 28 // privilege and security level of the transaction, and whether 29 // the transaction is a data access or an instruction access. 30 input wire [2 : 0] S_AXI_AWPROT, 31 // Write address valid. This signal indicates that the master signaling 32 // valid write address and control information. 33 input wire S_AXI_AWVALID, 34 // Write address ready. This signal indicates that the slave is ready 35 // to accept an address and associated control signals. 36 output wire S_AXI_AWREADY, 37 // Write data (issued by master, acceped by Slave) 38 input wire [C_S_AXI_DATA_WIDTH-1 : 0] S_AXI_WDATA, 39 // Write strobes. This signal indicates which byte lanes hold 40 // valid data. There is one write strobe bit for each eight 41 // bits of the write data bus. 42 input wire [(C_S_AXI_DATA_WIDTH/8)-1 : 0] S_AXI_WSTRB, 43 // Write valid. This signal indicates that valid write 44 // data and strobes are available. 45 input wire S_AXI_WVALID, 46 // Write ready. This signal indicates that the slave 47 // can accept the write data. 48 output wire S_AXI_WREADY, 49 // Write response. This signal indicates the status 50 // of the write transaction. 51 output wire [1 : 0] S_AXI_BRESP, 52 // Write response valid. This signal indicates that the channel 53 // is signaling a valid write response. 54 output wire S_AXI_BVALID, 55 // Response ready. This signal indicates that the master 56 // can accept a write response. 57 input wire S_AXI_BREADY, 58 // Read address (issued by master, acceped by Slave) 59 input wire [C_S_AXI_ADDR_WIDTH-1 : 0] S_AXI_ARADDR, 60 // Protection type. This signal indicates the privilege 61 // and security level of the transaction, and whether the 62 // transaction is a data access or an instruction access. 63 input wire [2 : 0] S_AXI_ARPROT, 64 // Read address valid. This signal indicates that the channel 65 // is signaling valid read address and control information. 66 input wire S_AXI_ARVALID, 67 // Read address ready. This signal indicates that the slave is 68 // ready to accept an address and associated control signals. 69 output wire S_AXI_ARREADY, 70 // Read data (issued by slave) 71 output wire [C_S_AXI_DATA_WIDTH-1 : 0] S_AXI_RDATA, 72 // Read response. This signal indicates the status of the 73 // read transfer. 74 output wire [1 : 0] S_AXI_RRESP, 75 // Read valid. This signal indicates that the channel is 76 // signaling the required read data. 77 output wire S_AXI_RVALID, 78 // Read ready. This signal indicates that the master can 79 // accept the read data and response information. 80 input wire S_AXI_RREADY 81 ); 82 83 // AXI4LITE signals 84 reg [C_S_AXI_ADDR_WIDTH-1 : 0] axi_awaddr; 85 reg axi_awready; 86 reg axi_wready; 87 reg [1 : 0] axi_bresp; 88 reg axi_bvalid; 89 reg [C_S_AXI_ADDR_WIDTH-1 : 0] axi_araddr; 90 reg axi_arready; 91 reg [C_S_AXI_DATA_WIDTH-1 : 0] axi_rdata; 92 reg [1 : 0] axi_rresp; 93 reg axi_rvalid; 94 95 // Example-specific design signals 96 // local parameter for addressing 32 bit / 64 bit C_S_AXI_DATA_WIDTH 97 // ADDR_LSB is used for addressing 32/64 bit registers/memories 98 // ADDR_LSB = 2 for 32 bits (n downto 2) 99 // ADDR_LSB = 3 for 64 bits (n downto 3) 100 localparam integer ADDR_LSB = (C_S_AXI_DATA_WIDTH/32) + 1; 101 localparam integer OPT_MEM_ADDR_BITS = 1; 102 //---------------------------------------------- 103 //-- Signals for user logic register space example 104 //------------------------------------------------ 105 //-- Number of Slave Registers 4

