
摘要 在我的想象中機器人首先應該能自由的走來走去,然後應該能流利的與主人對話。朝著這個理想,我準備設計一個能自由行走,並且可以與人語音對話的機器人。實現的關鍵是讓機器人能通過感測器感知周圍環境,並通過機器人大腦處理並輸出反饋和執行動作。本章節涉及到的感測器有激光雷達、IMU、輪式里程計、麥克風、音響 ...
摘要
在我的想象中機器人首先應該能自由的走來走去,然後應該能流利的與主人對話。朝著這個理想,我準備設計一個能自由行走,並且可以與人語音對話的機器人。實現的關鍵是讓機器人能通過感測器感知周圍環境,並通過機器人大腦處理並輸出反饋和執行動作。本章節涉及到的感測器有激光雷達、IMU、輪式里程計、麥克風、音響、攝像頭,和用於處理信息的嵌入式主板。關於感測器的ROS驅動程式開發和在機器人上的使用在後面的章節會展開,本章節重點對機器人感測器和嵌入式主板進行講解,主要內容:
5.機器人大腦嵌入式主板性能對比
從事SLAM與機器人導航也有幾年時間了,期間用過不少的嵌入式主板做開發。機器人是軟硬體結合的一個實體,這裡就對機器人的大腦(嵌入式主板)進行一些討論。結合我用過的一些嵌入式開發板,展開對比分析,具體型號如圖32。
(圖32)我用過的嵌入式板型號
5.1.樹莓派3
樹莓派一直很火,現在已經推出第三代了。這裡放一張樹莓派0、樹莓派2、樹莓派3的全家福吧,如圖33。
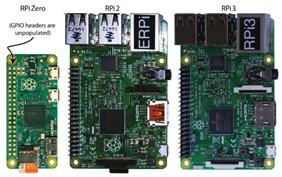
(圖33)樹莓派全家福
接下來看看具體的性能參數,如圖34。如果想瞭解更多關於樹莓派的資料,可以閱讀樹莓派的wiki教程https://en.wikipedia.org/wiki/Raspberry_Pi。

(圖34)樹莓派性能參數
樹莓派3,售價200RMB左右,CPU是1.2Ghz ARM-Cortex-A53,記憶體1GB,板載wifi模塊,還有一個多媒體顯示GPU(不過感覺沒什麼用)。CPU和記憶體配置算的的上是同等價位嵌入式主板的戰鬥機了,板載wifi這個也很實用。雖然樹莓派支持安裝很多種linux系統,由於我這裡要跑ROS機器人系統,所以我選擇了安裝ubuntu-mate-16.04, ubuntu-mate-16.04 LTS實際上是ubuntu-16.04 LTS的一部分,為桌面、Raspberry Pi 2和3單片機準備的,這也是Ubuntu MATE的首個LTS長期支持版,亮點在於包含MATE 1.12.1桌面環境,針對平板支持多點觸控和“自然滾動”,對多屏幕設置提供更好的支持,更好的會話管理,擴展的systemd支持,改進過的Power小程式——可顯示產品型號和提供商信息等內容。

(圖35)ubuntu-mate-16.04系統界面
安裝好ubuntu-mate-16.04操作系統後,上電可以看到圖35所示的系統界面,就可以安裝kinetic版本的ROS了,然後就可以驗證SLAM演算法了。Gmapping激光SLAM建圖和ros-navigation自動導航跑的都很順暢;google-cartographer進行建圖和重定位也沒什麼問題;跑ORB-SLAM2的Mono模式就不太行了,幀率5幀以內。
5.2.Firefly-RK3399
螢火蟲開發板還是很強大的板子分RK3288和RK3399兩個版本,先看一下官方的宣傳廣告。

(圖36)Firefly-RK3399
如圖36所示,RK3399雙核CortexA72+四核CortexA53的CPU和2GB/4GB可選配的記憶體,一看這些配置就知道很強大,的確跑各種視覺演算法很不錯,不過1000RMB的售價感覺有點小貴。
5.3.Nvidia-jetson-TK1

(圖37)Nvidia-jetson-TK1
Tegra K1是Nvidia推出的一款AI級別的嵌入式主板,ARM-Cortex-A15的CPU,192個CUDA核心的kepler架構的GPU,2GB記憶體,如圖37。有人用Tegra K1做了一個計算集群,感覺還挺有意思的,如圖38。

(圖38)Nvidia-jetson-TK1計算集群
5.4.Nvidia-jetson-TX2
Jetson TX2的是可以作為核武器的處理器的(@~@),性能是十分強大的。簡單的智能小車或者機器人不推薦使用TX2,性價比比較低。利用TX2做處理器,控制移動平臺(高精度的小車底盤)做SLAM我覺得是一個相當有意思的項目,TX2的處理能力非常適合實現機器視覺。
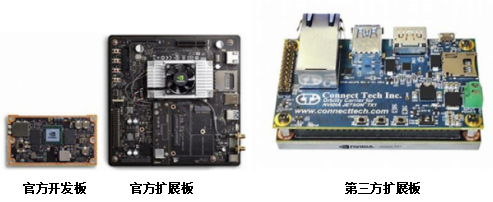
(圖39)Nvidia-jetson-TX2
圖39中左邊是官方的開發板和擴展板,不過由於官方擴展板體積太大了用在很多地方不方便,於是網上推出了一款小巧的擴展板Connect Tech Inc很不錯。
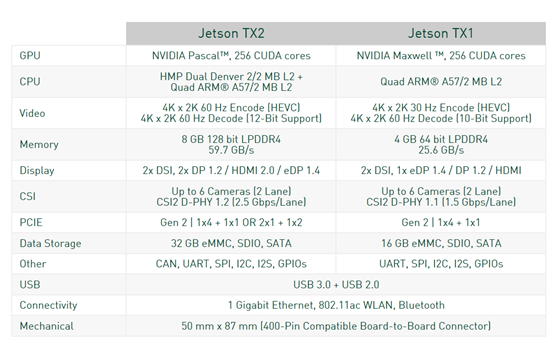
(圖40)Nvidia-jetson-TX1/2性能參數
這個是性能表,看上去也是叼叼的,不過售價不便宜接近5000RMB。。。
5.5.Intel-NUC
前面介紹的都是ARM架構的主板,現在介紹一款X86架構的主板NUC。

(圖41)Intel-NUC
之前用過Intel-NUC7-i7,19V供電65W功耗感覺不適合嵌入式級別的應用場合,而且3000RMB的售價也沒法和Nvidia-jetson-TX2比較性價比,所以不推薦在機器人上使用。
5.6.Intel-Edison
其實這是intel一個失敗的嘗試,主打物聯網應用,CPU採用intel的Atom處理器,最大的亮點是可以在主板上直接擴展Ardunio單片機開發板。如圖42。

(圖42)Intel-Edison
其實個人不推薦用Edison來開發SLAM演算法,不過也有公司做這方面的嘗試,比如上海思嵐科技的SLAMWARE-CORE就是Edison的模仿者。

(圖43)SLAMWARE-CORE
5.7.Google-Tango-phone
其實Tango-phone是一個完整的AR方案,手機內集成了深度相機和VO視覺里程計。

(圖44)Tango-phone
看網上的演示視頻也是十分的炫酷,不過最終這個項目還是沒有在google中火起來,可能還是存在不少問題的吧。
5.8.總結
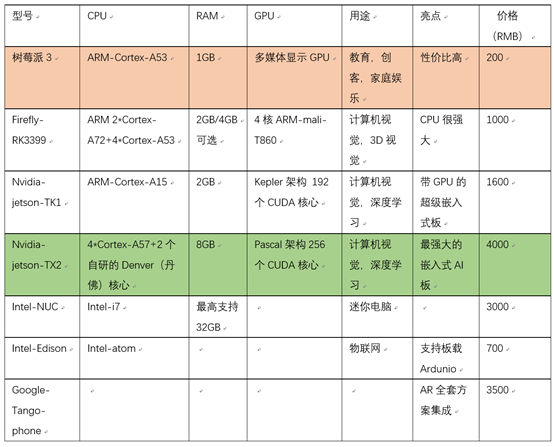
(圖45)性能對比
最後,總結一些各個開發板的性能對比,見圖45。玩機器人和SLAM的朋友們,如果是中低端需求推薦樹莓派3,高端需求推薦jetson-TX2。
後記
如果大家對博文的相關類容感興趣,或有什麼技術疑問,歡迎加入下麵的《SLAM+語音機器人DIY》QQ技術交流群,一起討論學習^_^



