
摘要 運動底盤是移動機器人的重要組成部分,不像激光雷達、IMU、麥克風、音響、攝像頭這些通用部件可以直接買到,很難買到通用的底盤。一方面是因為底盤的尺寸結構和參數是要與具體機器人匹配的;另一方面是因為底盤包含軟硬體整套解決方案,是很多機器人公司的核心技術,一般不會隨便公開。出於強烈的求知欲與學習熱情 ...
摘要
運動底盤是移動機器人的重要組成部分,不像激光雷達、IMU、麥克風、音響、攝像頭這些通用部件可以直接買到,很難買到通用的底盤。一方面是因為底盤的尺寸結構和參數是要與具體機器人匹配的;另一方面是因為底盤包含軟硬體整套解決方案,是很多機器人公司的核心技術,一般不會隨便公開。出於強烈的求知欲與學習熱情,我想自己DIY一整套兩輪差分底盤,並且將完整的設計過程公開出去供大家學習。說乾就乾,本章節主要內容:
1.stm32主控硬體設計
完整的stm32主控硬體包括:帶霍爾編碼器的直流減速電機、電機驅動、stm32單片機開發板等配件。
1.1.帶霍爾編碼器的直流減速電機
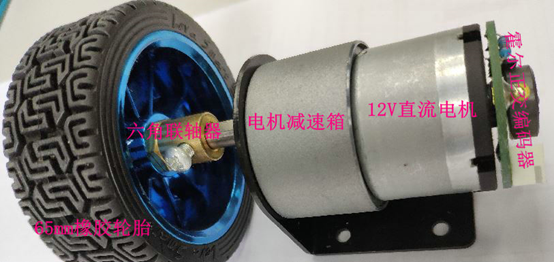
(圖1)帶霍爾編碼器的直流減速電機
要製作一臺機器人底盤,需要一套完整的電機部件,就如圖1中看到的一樣,需要有輪胎、聯軸器、減速箱、電機和編碼器,具體選型可以參考這幾個方面的因素:
輪胎:直徑越大,小車的越障能力越好,但會降低小車爬坡的馬力;
聯軸器:選擇跟輪胎與電機輸出軸尺寸相匹配的型號;
減速箱:減速比決定電機輸出軸的扭矩,減速比越大,輸出軸扭矩越大,但輸出軸轉速越慢;
電機:一般是12V的電機,直流有刷簡單易控制;
編碼器:一般為增量式正交編碼器,編碼線數根據實際需要精度進行選擇。

(圖2)電機接線埠
如圖2,可以清楚的看到電機的接線埠,其實電路板上也是有絲印標註的。接線分為兩類,一類是電機控制(電機線+、電機線-),另一類是編碼器(編碼器5V、編碼器A相、編碼器B相、編碼器GND)。
1.2.電機驅動電路

(圖3)TB6612FNG電機驅動
瞭解了電機的構造知識後,就來介紹一下如何將電機驅動起來。如圖3所示,TB6612FNG是很流行的一款電機驅動晶元,相比於傳統的L298N效率上提升很多,而且體積大幅減小。TB6612FNG是雙驅動,也就是可以驅動兩個電機;TB6612FNG每通道輸出最高1.2 A的連續驅動電流,啟動峰值電流達2A/3.2 A(連續脈衝/單脈衝);4種電機控制模式:正轉/反轉/制動/停止;PWM支持頻率高達100 kHz。
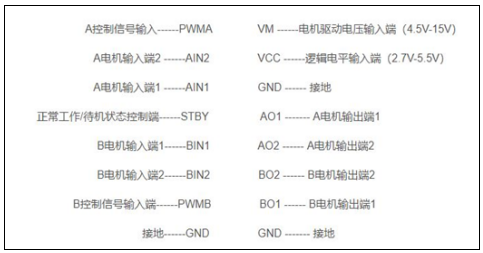
(圖4)TB6612FNG引腳定義
TB6612FNG的引腳定義,如圖4所示,引腳分為電源腳、控制輸入腳、控制輸出腳。
VM:為電機驅動電壓,根據實際電機額定電壓選擇,推薦使用12V供電;
VCC:邏輯電源供電,推薦使用5V供電;
STBY:待機/工作狀態切換,低電平待機,高電平工作;
PWMA:A埠電機PWM調速信號輸入;
AIN1和AIN2:A電機轉向控制信號輸入;
PWMB:B埠電機PWM調速信號輸入;
BIN1和BIN2:B電機轉向控制信號輸入;
AO1和AO2:A埠電機驅動信號輸出;
BO1和BO2:B埠電機驅動信號輸出。

(圖5)TB6612FNG控制信號真值表
最後,我們來看一下控制信號的邏輯真值表,如圖5,輸入由單片機IO口給定,再結合PWM信號,便可以實現對電機的正/反轉和調速控制了。由於兩路電機控制是一模一樣的,所以另一路控制信號的邏輯真值表就不重覆贅述了。
1.3.霍爾正交編碼器原理
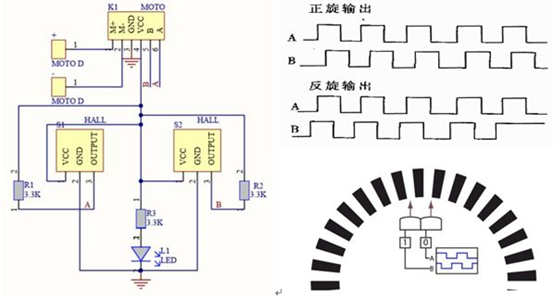
(圖6)霍爾正交編碼器原理
如果兩個信號相位相差90度,則這兩個信號稱為正交。由於兩個信號相位相差90度,因此可以根據兩個信號哪個先哪個後來判斷方向。利用單片機的IO口對編碼器的A、B相進行捕獲,很容易得到電機的轉速和轉向。霍爾正交編碼器原理,如圖6。
1.4.stm32單片機最小系統
stm32單片機常用的型號是stm32f103,根據具體需求的Flash容量、RAM容量、IO口數量進行選擇,下麵是常用的一些型號參數對比,如圖7。

(圖7)stm32f103系列單片機參數對比
考慮到stm32主控只是用於兩個電機的控制,資源開銷不算大,需要用到的IO口也不是很多,定時器資源也不多,出於性價比考慮推薦stm32f103c8t6這個型號。

(圖8)stm32f103f103c8t6最小系統板
如圖8所示,stm32f103c8t6最小系統板比較簡潔,控制兩個電動機,只需要用兩個IO口輸出2路PWM分別給兩個電機調速,用4個IO口分別控制兩個電機的方向,另外4個IO口分別接兩個電機的正交編碼器輸入,UART1與UART2跟上位機連接分別用於程式debug與上層指令控制。
1.5.stm32主控硬體整體框圖
第一個版本的硬體電路是用飛線連接的各個模塊,電路穩定性很差,而且外觀極其醜陋。痛定思痛,決心老老實實設計電路板,把各模塊集成到一個板子上,經過兩次改板打樣,終於成功了。如圖9,板子簡潔美觀,而且接插端子佈局合理,符合我一向嚴苛的標準。
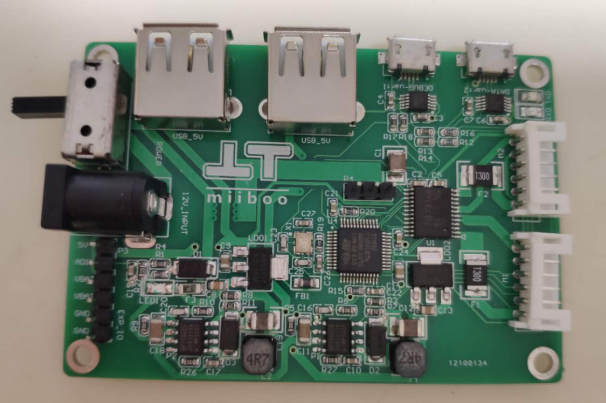
(圖9)stm32主控電路板
好了,有了這個電路板就好辦多了。針對這個電路板,講講我的設計思路吧。首先需要設計一個電源系統,用於單片機供電、電機供電、外部設備供電,同時還要考慮電源反接、過壓、短路等保護;然後需要設計一個stm32單片機最小系統電路;最後圍繞stm32最小系統,需要設計電機驅動、UART轉USB、編碼器信號捕獲這些外圍電路,同時還要考慮電機堵轉保護、電機對系統電源干擾等問題。逐一採坑之後,差不多就完成設計了。stm32主控硬體整體框圖,如圖10。
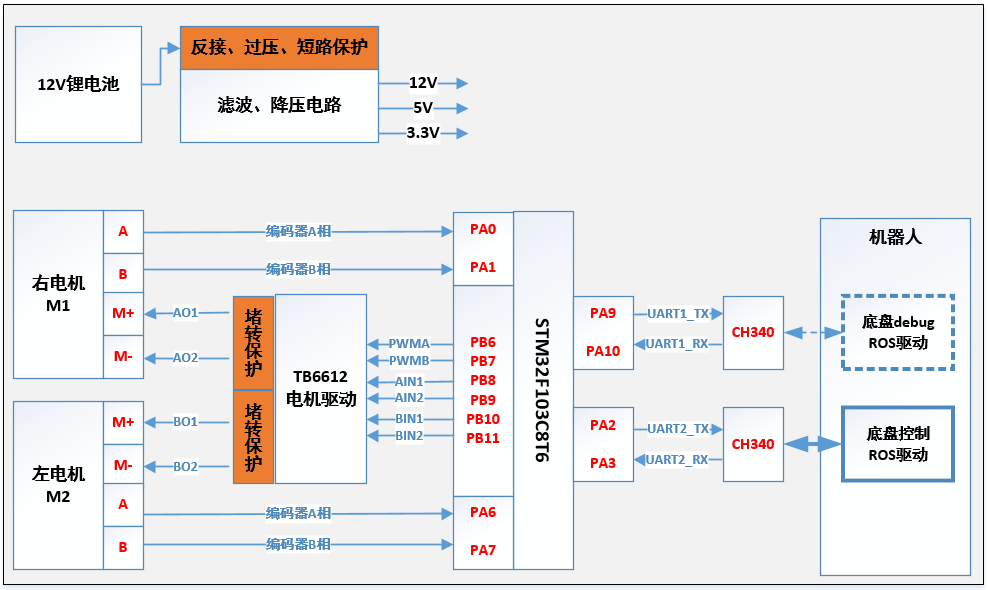
(圖10)stm32主控硬體整體框圖
後記
如果大家對博文的相關類容感興趣,或有什麼技術疑問,歡迎加入下麵的《SLAM+語音機器人DIY》QQ技術交流群,一起討論學習^_^



