
@目錄1.流程2.自定義發佈數據2.1 std_msgs內置類型2.2 編寫.msg文件2.3 修改package.xml文件2.3.1 完整的package.xml文件2.4 修改CMakeLists.txt文件2.4.1 修改find_package指令2.4.2 添加add_message_f ...
@
目錄1.流程
話題通信是ROS中使用頻率最高的一種通信模式,話題通信是基於發佈訂閱模式的,也即:一個節點發佈消息,另一個節點訂閱該消息。在ROS中,實現話題通信只需要如下幾步:
- 確定要發佈的數據類型,一般都需要自定義.msg文件,修改好CMakeLists.txt文件和package.xml文件並重編譯
- 編寫發佈方和訂閱方的cpp文件,修改好CMakeLists.txt文件並重編譯
- 分別啟動發佈方節點和訂閱方節點,順序無所謂
2.自定義發佈數據
在 ROS 通信協議中,數據載體是一個較為重要組成部分,ROS 中通過 std_msgs 封裝了一些原生的數據類型。但是,這些數據一般只包含一個 data 欄位,結構的單一意味著功能上的局限性,當傳輸一些複雜的數據, std_msgs 由於描述性較差而顯得力不從心,這種場景下必須通過編寫.msg文件來自定義消息類型。
2.1 std_msgs內置類型
- 內置類型與 C++ 和 Python 中的對應關係:
| Primitive Type | C++ | Python |
|---|---|---|
| bool | uint8_t | bool |
| int8 | int8_t | int |
| uint8 | uint8_t | int |
| int16 | int16_t | int |
| uint16 | uint16_t | int |
| int32 | uint32_t | int |
| uint64 | uint64_t | long int |
| float32 | float | float |
| float64 | double | float |
| string | std::string | str bytes |
| time | ros::Time | rospy.Time |
| duration | ros::Duration | rospy.Duration |
- 內置類型的數組與 C++ 和 Python 中的對應關係:
| Primitive Type | C++ | Python |
|---|---|---|
| variable-length | std::vector | tuple |
| fixed-length | boost::array<T, length>或std::vector |
tuple |
2.2 編寫.msg文件
示例如下:
#文件名Person.msg
string name
uint16 age
float64 height
2.3 修改package.xml文件
- 查看是否存在如下編譯依賴
<build_depend>message_generation</build_depend>
- 查看是否存在如下執行依賴
<exec_depend>message_generation</exec_depend>
2.3.1 完整的package.xml文件
<?xml version="1.0"?>
<package format="2">
<name>chat</name>
<version>0.0.0</version>
<description>The chat package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="[email protected]">Jane Doe</maintainer> -->
<maintainer email="[email protected]">xu736946693</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/chat</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="[email protected]">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<!-- <build_depend>roscpp</build_depend> -->
<!-- <exec_depend>roscpp</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>message_runtime</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>message_generation</build_depend>
<build_depend>roscpp</build_depend>
<build_depend>rospy</build_depend>
<build_depend>std_msgs</build_depend>
<build_export_depend>roscpp</build_export_depend>
<build_export_depend>rospy</build_export_depend>
<build_export_depend>std_msgs</build_export_depend>
<exec_depend>message_generation</exec_depend>
<exec_depend>roscpp</exec_depend>
<exec_depend>rospy</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
</export>
</package>
2.4 修改CMakeLists.txt文件
2.4.1 修改find_package指令
# 需要加入 message_generation,必須有 std_msgs
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
2.4.2 添加add_message_files指令
## 配置 msg 源文件
add_message_files(
FILES
Person.msg
)
2.4.3 添加generate_messages指令
generate_messages(
DEPENDENCIES
std_msgs
)
2.4.4 修改catkin_package指令
#執行時依賴
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
其中,add_message_files指令必須要在generate_messages指令的前面,然後在工作空間目錄編譯即可。
2.5 查看頭文件
經過以上幾步,在${workspace}/devel/include/${package}/目錄下應該會出現一個頭文件,如圖:
- 如果沒有出現,是無法進行接下來的步驟的。這時,只需要把
${workspace}/目錄下的build目錄和devel目錄全部刪除,然後重新編譯即可。
rm -rf build/
rm -rf devel/
catkin_make
3.編寫cpp文件
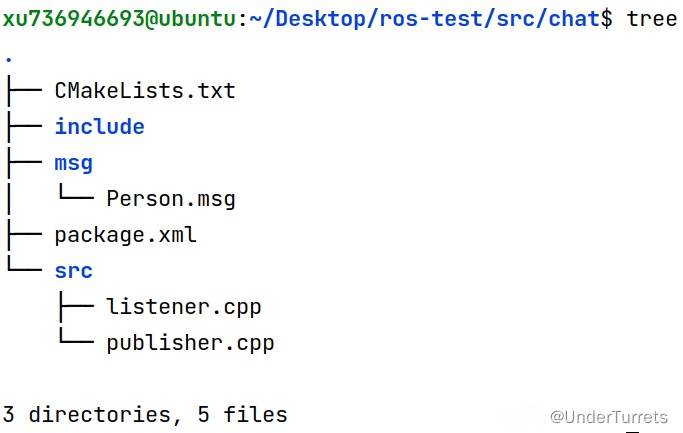
3.1 功能包目錄文件樹
3.2 修改CMakeLists.txt文件
3.2.1 添加add_executable指令
add_executable(publisher
src/publisher.cpp)
add_executable(listener
src/listener.cpp)
3.2.2 添加add_dependencies指令
add_dependencies(publisher ${PROJECT_NAME}_generate_messages_cpp)
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp)
3.2.3 添加target_link_libraries指令
target_link_libraries(person_talker
${catkin_LIBRARIES}
)
target_link_libraries(person_listener
${catkin_LIBRARIES}
)
3.2.4 完整的CMakeLists.txt
- 其中很多語句都是catkin_make自動生成的
cmake_minimum_required(VERSION 3.0.2)
project(chat)
## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)
## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTS
roscpp
rospy
std_msgs
message_generation
)
## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)
## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()
################################################
## Declare ROS messages, services and actions ##
################################################
## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)
# Generate messages in the 'msg' folder
add_message_files(
FILES
Person.msg
)
## Generate services in the 'srv' folder
# add_service_files(
# FILES
# Service1.srv
# Service2.srv
# )
## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )
## Generate added messages and services with any dependencies listed here
# 生成消息時依賴於 std_msgs
generate_messages(
DEPENDENCIES
std_msgs
)
################################################
## Declare ROS dynamic reconfigure parameters ##
################################################
## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed
## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )
###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
#執行時依賴
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES demo02_talker_listener
CATKIN_DEPENDS roscpp rospy std_msgs message_runtime
# DEPENDS system_lib
)
###########
## Build ##
###########
## Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include
${catkin_INCLUDE_DIRS}
)
## Declare a C++ library
# add_library(${PROJECT_NAME}
# src/${PROJECT_NAME}/pkg1.cpp
# )
## Add cmake target dependencies of the library
## as an example, code may need to be generated before libraries
## either from message generation or dynamic reconfigure
# add_dependencies(${PROJECT_NAME} ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
## Declare a C++ executable
## With catkin_make all packages are built within a single CMake context
## The recommended prefix ensures that target names across packages don't collide
# add_executable(${PROJECT_NAME}_node src/pkg1_node.cpp)
add_executable(publisher
src/publisher.cpp)
add_executable(listener
src/listener.cpp)
## Rename C++ executable without prefix
## The above recommended prefix causes long target names, the following renames the
## target back to the shorter version for ease of user use
## e.g. "rosrun someones_pkg node" instead of "rosrun someones_pkg someones_pkg_node"
# set_target_properties(${PROJECT_NAME}_node PROPERTIES OUTPUT_NAME node PREFIX "")
## Add cmake target dependencies of the executable
## same as for the library above
# add_dependencies(${PROJECT_NAME}_node ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
add_dependencies(publisher ${PROJECT_NAME}_generate_messages_cpp)
add_dependencies(listener ${PROJECT_NAME}_generate_messages_cpp)
## Specify libraries to link a library or executable target against
# target_link_libraries(${PROJECT_NAME}_node
# ${catkin_LIBRARIES}
# )
#############
## Install ##
#############
# all install targets should use catkin DESTINATION variables
# See http://ros.org/doc/api/catkin/html/adv_user_guide/variables.html
## Mark executable scripts (Python etc.) for installation
## in contrast to setup.py, you can choose the destination
# catkin_install_python(PROGRAMS
# scripts/my_python_script
# DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark executables for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_executables.html
# install(TARGETS ${PROJECT_NAME}_node
# RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
# )
## Mark libraries for installation
## See http://docs.ros.org/melodic/api/catkin/html/howto/format1/building_libraries.html
# install(TARGETS ${PROJECT_NAME}
# ARCHIVE DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# LIBRARY DESTINATION ${CATKIN_PACKAGE_LIB_DESTINATION}
# RUNTIME DESTINATION ${CATKIN_GLOBAL_BIN_DESTINATION}
# )
## Mark cpp header files for installation
# install(DIRECTORY include/${PROJECT_NAME}/
# DESTINATION ${CATKIN_PACKAGE_INCLUDE_DESTINATION}
# FILES_MATCHING PATTERN "*.h"
# PATTERN ".svn" EXCLUDE
# )
## Mark other files for installation (e.g. launch and bag files, etc.)
# install(FILES
# # myfile1
# # myfile2
# DESTINATION ${CATKIN_PACKAGE_SHARE_DESTINATION}
# )
#############
## Testing ##
#############
## Add gtest based cpp test target and link libraries
# catkin_add_gtest(${PROJECT_NAME}-test test/test_pkg1.cpp)
# if(TARGET ${PROJECT_NAME}-test)
# target_link_libraries(${PROJECT_NAME}-test ${PROJECT_NAME})
# endif()
target_link_libraries(publisher
${catkin_LIBRARIES}
)
target_link_libraries(listener
${catkin_LIBRARIES}
)
## Add folders to be run by python nosetests
# catkin_add_nosetests(test)
3.3 發佈方cpp
示例如下:
/*
需求: 實現基本的話題通信,一方發佈數據,一方接收數據,
實現的關鍵點:
1.發送方
2.接收方
3.數據
PS: 二者需要設置相同的話題
消息發佈方:
迴圈發佈信息:HelloWorld 尾碼數字編號
實現流程:
1.包含頭文件
2.初始化 ROS 節點:命名(唯一)
3.實例化 ROS 句柄
4.實例化 發佈者 對象
5.組織被髮布的數據,並編寫邏輯發佈數據
*/
// 1.包含頭文件
#include "ros/ros.h"
#include "chat/Person.h"
int main(int argc, char *argv[])
{
//設置編碼
setlocale(LC_ALL,"");
//2.初始化 ROS 節點:命名(唯一)
// 參數1和參數2 後期為節點傳值會使用
// 參數3 是節點名稱,是一個標識符,需要保證運行後,在 ROS 網路拓撲中唯一
ros::init(argc,argv,"talker");
//3.實例化 ROS 句柄
ros::NodeHandle nh;//該類封裝了 ROS 中的一些常用功能
//4.實例化 發佈者 對象
//泛型: 發佈的消息類型
//參數1: 要發佈到的話題
//參數2: 隊列中最大保存的消息數,超出此閥值時,先進的先銷毀(時間早的先銷毀)
ros::Publisher pub = nh.advertise<chat::Person>("chatter",10);
//5.組織被髮布的數據,並編寫邏輯發佈數據
//數據(動態組織)
chat::Person p;
p.name = "sunwukong";
p.age = 2000;
p.height = 1.45;
//邏輯(一秒1次)
ros::Rate r(1);
//節點不死
while (ros::ok())
{
//發佈消息
pub.publish(p);
//加入調試,列印發送的消息
ROS_INFO("我叫:%s,今年%d歲,高%.2f米", p.name.c_str(), p.age, p.height);p.age++;
//根據前面制定的發送貧頻率自動休眠 休眠時間 = 1/頻率;
r.sleep();
//暫無應用
ros::spinOnce();
}
return 0;
}
3.4 訂閱方cpp
示例如下:
/*
需求: 實現基本的話題通信,一方發佈數據,一方接收數據,
實現的關鍵點:
1.發送方
2.接收方
3.數據
消息訂閱方:
訂閱話題並列印接收到的消息
實現流程:
1.包含頭文件
2.初始化 ROS 節點:命名(唯一)
3.實例化 ROS 句柄
4.實例化 訂閱者 對象
5.處理訂閱的消息(回調函數)
6.設置迴圈調用回調函數
*/
// 1.包含頭文件
#include "ros/ros.h"
#include "chat/Person.h"
void doMsg(const chat::Person::ConstPtr& person_p){
ROS_INFO("訂閱的人信息:%s, %d, %.2f", person_p->name.c_str(), person_p->age, person_p->height);
}
int main(int argc, char *argv[])
{
//設置編碼
setlocale(LC_ALL,"");
//2.初始化 ROS 節點:命名(唯一)
ros::init(argc,argv,"listener");
//3.實例化 ROS 句柄
ros::NodeHandle nh;
//4.實例化 訂閱者 對象
ros::Subscriber sub = nh.subscribe<chat::Person>("chatter",10,doMsg);
//5.處理訂閱的消息(回調函數)
// 6.設置迴圈調用回調函數
ros::spin();//迴圈讀取接收的數據,並調用回調函數處理
return 0;
}
4.效果
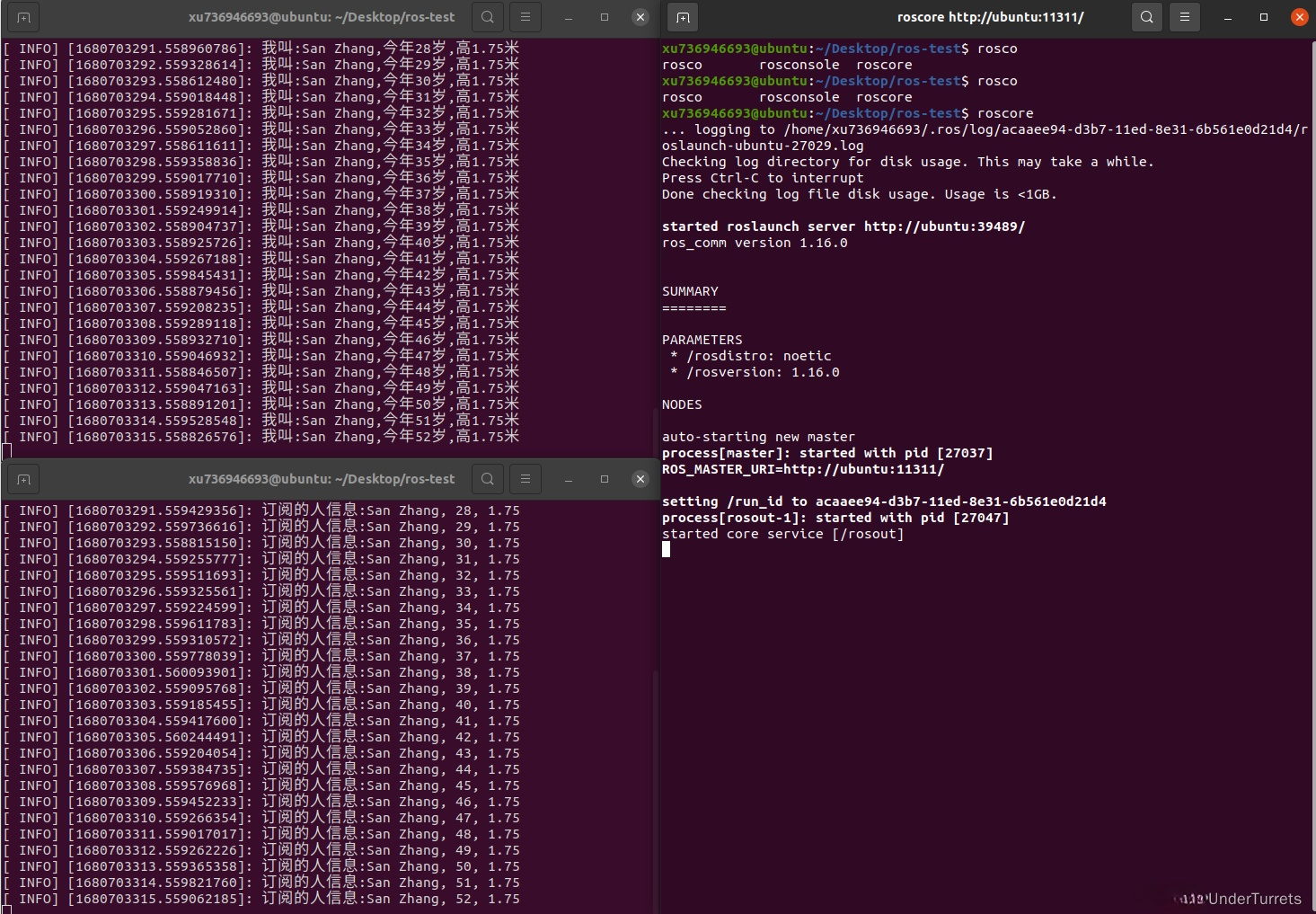
- 如果找不到可執行文件,就把工作目錄下的build文件夾和devel文件夾刪了重新編譯。
本文由博客一文多發平臺 OpenWrite 發佈!


