
卡爾曼濾波器(Kalman filter)是一種高效的遞歸濾波器, 能夠從一系列包含噪音的測量值中估計動態系統的狀態. 因為不需要存儲歷史狀態, 沒有複雜計算, 非常適合在資源有限的嵌入式系統中使用. 常用於飛行器的導引, 導航及控制, 機械和金融中的時間序列分析, 軌跡最佳化等. 本文對卡爾曼濾波... ...
卡爾曼濾波器(Kalman filter)是一種高效的遞歸濾波器, 能夠從一系列包含噪音的測量值中估計動態系統的狀態. 因為不需要存儲歷史狀態, 沒有複雜計算, 非常適合在資源有限的嵌入式系統中使用. 常用於飛行器的導引, 導航及控制, 機械和金融中的時間序列分析, 軌跡最佳化等. 卡爾曼濾波不需要假設誤差是正態分佈, 但如果誤差屬於正態分佈, 卡爾曼濾波的結果會更為準確.
卡爾曼濾波的計算分二個步驟: 預測與更新. 在預測階段, 濾波器基於上一步的預測結果, 預測當前狀態和誤差; 在更新階段, 濾波器利用當前的測量值和預測值, 計算得到新的狀態值和誤差.
- Original Error Estimate, calculate the Kalman Gain using Error in Estimate and Error in Data(Measurement)
預測階段, 用預測誤差和測量誤差計算卡爾曼增益 - Original Estimate, calculate Current Estimate using Kalman Gain, Previous Estimate and Measured Value
更新階段, 結合測量值, 用卡爾曼增益計算當前的狀態 - Calculate the new Error in Estimate
計算新的預測誤差
定義
完整的卡爾曼濾波定義是這樣的
-
Predict step 預測階段
- State prediction 預測系統狀態:
\(\hat{x_{t|t-1}} = F_t \hat{x_{t-1|t-1}} + B_t u_t\) - Uncertainty prediction 預測誤差:
\(P_{t|t-1} = F_t P_{t-1|t-1} F_t^T + Q_t\)
- State prediction 預測系統狀態:
-
Update step 更新階段
- Kalman gain 更新卡爾曼增益:
\(K_t = \frac{P_{t|t-1} H_t^T} {H_t P_{t|t-1} H_t^T + R_t}\) - State update 更新狀態:
\(\hat{x_{t|t}} = \hat{x_{t|t-1}} + K_t (z_t - H_t \hat{x_{t|t-1}})\) - Uncertainty update 更新誤差:
\(P_{t|t} = (I - K_t H_t) P_{t|t-1}\)
- Kalman gain 更新卡爾曼增益:
對以上符號的說明
- \(\hat{x}\): 預測的系統狀態向量
The state vector, which represents the true state of the system that we want to estimate. - \(t\): 時間序列
The time step index, corresponding to different time periods. - \(F_t\): 狀態轉移矩陣
The state transition matrix, which models how the system evolves from time step \(t-1\) to \(t\) without taking into account external factors. - \(B_t\): 控制輸入矩陣
The control input matrix, used to incorporate the effect of any external factors \(u_t\) (e.g., motors or steer engines inputs). - \(u_t\): 控制輸入向量
The control input vector, containing the external factors impacting the system. - \(P\): 誤差矩陣
The uncertainty (covariance) matrix, which quantifies our uncertainty about the estimated state. - \(Q_t\): 過程雜訊協方差矩陣
The process noise covariance matrix, representing the estimation error caused by our simplified model of the system state dynamics. Q矩陣表示系統模型的過程雜訊, 系統模型是一個近似值, 在系統狀態的整個生命周期中, 系統模型的準確性會發生波動, Q矩陣用於表示這種不確定性, 並增加了狀態上的現有雜訊. 例如飛行器電機的震動給加速度的讀數帶來的誤差. - \(H_t\): 觀察值轉換矩陣
The observation matrix, which models how the true system state is transformed into the observed system state. - \(K_t\): 卡爾曼增益
The Kalman gain, which determines how much we trust the new observation relative to our prediction. 卡爾曼增益是一個介於0到1之間的數, 用於表示在預測中觀察值所占的比重, 卡爾曼增益越大說明雜訊越大, 觀察值越重要. - \(z_t\): 觀察值(測量值)向量
The observation (measurement) vector, containing the recorded states. - \(R_t\): 測量雜訊協方差矩陣
測量雜訊指的是測量工具(如感測器)測量時的固有雜訊, 例如在靜止時加速度感測器讀數的上下波動, The observation noise covariance matrix, representing the measurement noise in the observed states. - \(I\): 單位矩陣
The identity matrix.
簡化
對於一個靜止(或勻速運動)的物體觀測加速度和角速度, 可以忽略控制輸入 \(B_t\) 和 \(u_t\), 將 \(F_t\), \(H_t\)視為單位矩陣, 卡爾曼計算公式可以簡化為
-
Predict step 預測階段,
- State prediction 預測狀態等於前一步的狀態:
\(\hat{x_{t|t-1}} = \hat{x_{t-1|t-1}}\) - Uncertainty prediction 預測誤差等於更新後的誤差加上過程雜訊:
\(P_{t|t-1} = P_{t-1|t-1} + Q_t\)
- State prediction 預測狀態等於前一步的狀態:
-
Update step 更新階段,
- Kalman gain 更新卡爾曼增益:
\(K_t = \frac{P_{t|t-1}} {P_{t|t-1} + R_t}\) - State update 更新狀態:
\(\hat{x_{t|t}} = \hat{x_{t|t-1}} + K_t (z_t - \hat{x_{t|t-1}})\) - Uncertainty update 更新誤差:
\(P_{t|t} = (I - K_t) P_{t|t-1}\)
- Kalman gain 更新卡爾曼增益:
實例
1. 初始化
令預測誤差初始值為 \(P = 10000\)
測量誤差\(σ = 0.1\),方差 \(σ^2 = 0.01\), 即 \(R\) 為固定的 0.01
雜訊方差為 \(q = 0.15\)
令初始預測值 $ \hat{x} = 10 $
預測誤差 $ P = P + q = 10000 + 0.15 = 10000.15 $
2. 觀察值 \(Z = 50.486\)
卡爾曼增益
\(K = \frac{P}{P + r} = \frac{10000.15}{10000.15 + 0.01} = 0.99999\)
更新系統狀態(等於預測狀態)
\(\hat{x} = \hat{x} + K * (Z - \hat{x}) = 10 + 0.99999 * (50.486 - 10) = 50.486\)
更新預測誤差
\(P = (1 - K) * P = (1 - 0.99999) * 10000.15 = 0.01\)
\(P = P + q = 0.01 + 0.15 = 0.16\)
3. 觀察值 \(Z = 50.963\)
卡爾曼增益
\(K = \frac{P}{P + r} = \frac{0.16}{0.16 + 0.01} = 0.9412\)
更新系統狀態(等於預測狀態)
\(\hat{x} = \hat{x} + K * (Z - \hat{x}) = 50.486 + 0.9412 * (50.963 - 50.486) = 50.934\)
更新預測誤差
\(P = (1 - K) * P = (1 - 0.9412) * 0.16 = 0.0094\)
\(P = P + q = 0.0094 + 0.15 = 0.1594\)
可以看到 \(P\) 和 \(K\) 的值迅速收斂
實現
一個簡單的C語言演示代碼, 會輸出每次迭代後產生的K增益, P誤差和預測值.
#include <stdio.h>
const int measures[] = {
-269, -255, -130, 228, -437, -1234, 1247, 173, -400, -1561, -1038, 207, 958, -516, -581, -716, -18, -1193, -989, -593, 484, 102, 718, 1362, 1563, 2683, 428, 1616, 2922, 2968, 3046, 3572, 4006, 4821, 3964, 3127, 3086, 3190, 3682, 4015, 4471, 4211, 4523, 5098, 6452, 5947, 6150, 5694, 6498, 7048, 7519, 6820, 5652, 6608, 7409, 8729, 10569, 10760, 9054, 9856, 8656, 7972, 9320, 6958, 6820, 7391, 7702, 8248, 9426, 8812, 8666, 8838, 7943, 6878, 7233, 7536, 8381, 8314, 7267, 6704, 7343, 6321, 6409, 6023, 7334, 7975, 7659, 6159, 5990, 6187, 6645, 6702, 6273, 7196, 7381, 6939, 4201, 4108, 5338, 6469, 4528, 3679, 4113, 4158, 3428, 2966, 3466, 3704, 3220, 2582, 2818, 3039, 2835, 1929, 1362, 890, 396, -201, -992, -1502, -2009, -1667, -1503, -1881, -2713, -3231, -2856, -2868, -2989, -4140, -4878, -4690, -3838, -4244, -5312, -9966, -6514, -5246, -4559, -4832, -6833, -8869, -9207, -8021, -7959, -9219, -10911, -12606, -12296, -11710, -10460, -10827, -13095, -12183, -10989, -9458, -9520, -10622, -12221, -11792, -9510, -7964, -7935, -8728, -9137, -8076, -6628, -6379, -7132, -8076, -7499, -6536, -5855, -6285, -7310, -7517, -7217, -6997, -6440, -5806, -4647, -4006, -4144, -3800, -2820, -1811, 215, 768, 531, 186, 514, 2117, 2618, 2396, 1600, 1477, 1800, 2329, 2015, 1585, 1461
};
static float k_gain, r_noise, q_noise, x_est, p_err, z_measure;
void Kalman_Init(void)
{
p_err = 1.0;
r_noise = 10.0;
q_noise = 1;
x_est = -200.0;
p_err = p_err + q_noise;
}
float Kalman_Update(float measure)
{
k_gain = p_err / (p_err + r_noise);
x_est = x_est + k_gain * (measure - x_est);
p_err = (1 - k_gain) * p_err;
p_err = p_err + q_noise;
return x_est;
}
int main(int argc, char *const argv[])
{
int i;
float estimate, new_measure;
Kalman_Init();
for (i = 0; i < sizeof(measures)/sizeof(int); i++)
{
estimate = Kalman_Update((float)measures[i]);
printf("%3d: %6d %10.5f %10.5f %10.5f\r\n", i, measures[i], k_gain, p_err, estimate);
}
return 0;
}
對參數的說明
measures數值來自於手持物體旋轉時陀螺儀感測器的真實讀數, 本例中陀螺儀的實測雜訊\(R\)在10至20這個數量級, 運動中的抖動來源於手持產生的抖動p_err = 1.0;和x_est = -200.0;, 預測和誤差的初始值可以隨意取一個接近的值, 如果不知道取什麼值, 設為0也問題不大.r_noise = 10.0;和q_noise = 1;這兩個值會顯著影響結果, 其中r_noise可以使用感測器收集靜止狀態數據後計算方差得到,q_noise無法明確計算, 初始可以賦0.1至1之間的數.
輸出結果格式
0: -269 0.04762 0.97619 -12.80952
1: -255 0.08894 1.38937 -34.34924
2: -130 0.12199 1.71988 -46.01752
3: 228 0.14675 1.96749 -5.80566
4: -437 0.16440 2.14403 -76.69533
5: -1234 0.17655 2.26550 -281.01764
6: 1247 0.18471 2.34705 1.21512
7: 173 0.19009 2.40090 33.86971
8: -400 0.19361 2.43607 -50.13048
9: -1561 0.19589 2.45887 -346.09082
10: -1038 0.19736 2.47359 -482.64551
11: 207 0.19831 2.48306 -345.88443
12: 958 0.19891 2.48915 -86.52280
13: -516 0.19930 2.49305 -172.11964
14: -581 0.19955 2.49555 -253.71368
15: -716 0.19971 2.49715 -346.03918
16: -18 0.19982 2.49818 -280.49121
17: -1193 0.19988 2.49883 -462.88641
...
使用不同的 r_noise 和 q_noise 得到的變化曲線如圖
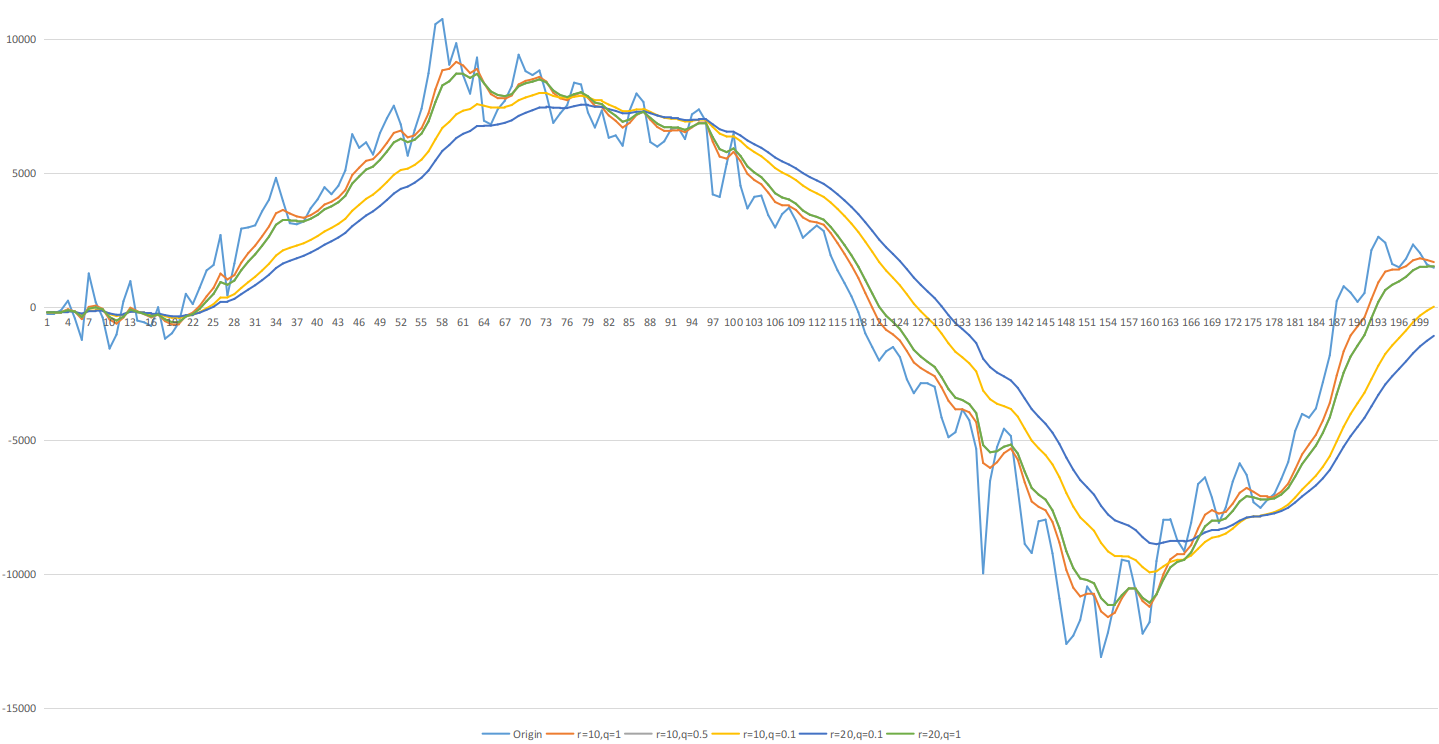
圖中變化最劇烈的藍色曲線是從感測器得到的原始測量值, 可以看到原始數據的抖動是很明顯的, 經過卡爾曼濾波後可以明顯消除抖變, 使結果數據更平滑.
通過變換多種雜訊組合, 可以觀察到的現象有
- 在
r_noise和q_noise不變的情況下, 不管p_err和x_est設置什麼初始值, 都會很快收斂, 最後輸出相同的結果序列(這點沒有在本例體現, 需要自己驗證) r_noise越大表示測量雜訊越大, 測量值的權重越低,r_noise越大, 結果越平滑但是延遲也越大q_noise是系統的固有誤差,q_noise越小, 結果越平滑延遲越大r_noise和q_noise等比例變化時, 產生的結果序列不變, 圖中 r=10,q=0.5 和 r=20,q=1 這兩個曲線是重合的.
總結
從卡爾曼濾波器的定義看
- 整個過程中, 對狀態 \(\hat{x}\) 的預測和更新, 除了自身和觀測值\(z_t\)之外, 關係到這幾個參數 \(F_t, B_t, u_t, K_t, H_t\), 其中 \(F_t, u_t, H_t\) 在系統中都相對固定, 而 \(B_t\) 是已知輸入, 例如電機或舵機的動作, 已知且確定的, 不存在雜訊, 真正起作用的是 \(K_t\) 這個參數.
- 而 \(K_t\) 這個參數的計算, 和 \(\hat{x}\) 沒關係. 系統中不存在反饋, 觀測值 \(z_t\) 和預測值 \(\hat{x}\) 都不會影響 \(K_t\), 只要 \(H_t, R_t, Q_t\) 這三個值固定, 最後 \(K_t\) 會收斂為一個常量
當符合上面兩點條件時, 狀態的更新公式就變成下麵的式子
\(\hat{x_{t|t}} = \hat{x_{t|t-1}} + K_t (z_t - \hat{x_{t|t-1}}) \\ = \hat{x_{t|t-1}} + K_t z_t - K_t \hat{x_{t|t-1}} \\ = (1 - K_t) \hat{x_{t|t-1}} + K_t z_t\)
令 \(\beta = 1 - K_t\), 這就是一個典型的離散序列差分方程(difference equation)構成的低通濾波器
\(\hat{x_{t|t}} = \beta \hat{x_{t|t-1}} + (1 - \beta) z_t\)
在實際使用中, \(Q\)和\(R\)大概率是常數, 增益\(K_t\)會快速收斂, 上面的式子更簡單, 更容易理解和實現, 也符合它的典型使用方式, 即手動調整\(\beta\) (等價於調整\(Q\)和\(R\)), 在延遲和平滑之間找到最佳平衡.
參考
- 卡爾曼濾波 非常好的介紹 https://www.kalmanfilter.net/CN/alphabeta_cn.html
- 擴展卡爾曼濾波 https://simondlevy.github.io/ekf-tutorial/
- 概念說明和Python實現 https://forecastegy.com/posts/kalman-filter-for-time-series-forecasting-in-python/
- 另一篇淺顯易懂的卡爾曼濾波器說明 https://thekalmanfilter.com/kalman-filter-explained-simply/


