
背景 Read the fucking source code! --By 魯迅 A picture is worth a thousand words. --By 高爾基 說明: Kernel版本:4.14 ARM64處理器,Contex-A53,雙核 使用工具:Source Insight 3. ...
背景
Read the fucking source code!--By 魯迅A picture is worth a thousand words.--By 高爾基
說明:
- Kernel版本:4.14
- ARM64處理器,Contex-A53,雙核
- 使用工具:Source Insight 3.5, Visio
1. 概述
中斷子系統中有一個重要的設計機制,那就是Top-half和Bottom-half,將緊急的工作放置在Top-half中來處理,而將耗時的工作放置在Bottom-half中來處理,這樣確保Top-half能儘快完成處理,那麼為什麼需要這麼設計呢?看一張圖就明白了:

- ARM處理器在進行中斷處理時,處理器進行異常模式切換,此時會將中斷進行關閉,處理完成後再將中斷打開;
- 如果中斷不分上下半部處理,那麼意味著只有等上一個中斷完成處理後才會打開中斷,下一個中斷才能得到響應。當某個中斷處理處理時間較長時,很有可能就會造成其他中斷丟失而無法響應,這個顯然是難以接受的,比如典型的時鐘中斷,作為系統的脈搏,它的響應就需要得到保障;
- 中斷分成上下半部處理可以提高中斷的響應能力,在上半部處理完成後便將中斷打開(通常上半部處理越快越好),這樣就可以響應其他中斷了,等到中斷退出的時候再進行下半部的處理;
- 中斷的
Bottom-half機制,包括了softirq、tasklet、workqueue、以及前文中提到過的中斷線程化處理等,其中tasklet又是基於softirq來實現的,這也是本文討論的主題;
在中斷處理過程中,離不開各種上下文的討論,瞭解不同上下文的區分有助於中斷處理的理解,所以,還是來一張老圖吧:
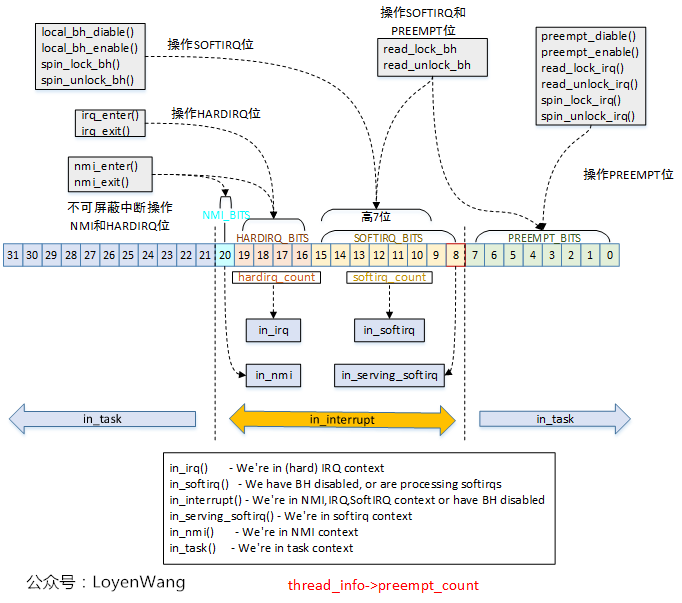
task_struct結構體中的thread_info.preempt_count用於記錄當前任務所處的context狀態;PREEMPT_BITS:用於記錄禁止搶占的次數,禁止搶占一次該值就加1,使能搶占該值就減1;SOFTIRQ_BITS:用於同步處理,關掉下半部的時候加1,打開下半部的時候減1;HARDIRQ_BITS:用於表示處於硬體中斷上下文中;
前戲結束了,直奔主題吧。
2. softirq
2.1 初始化
softirq不支持動態分配,Linux kernel提供了靜態分配,關鍵的結構體描述如下,可以類比硬體中斷來理解:
/* 支持的軟中斷類型,可以認為是軟中斷號, 其中從上到下優先順序遞減 */
enum
{
HI_SOFTIRQ=0, /* 最高優先順序軟中斷 */
TIMER_SOFTIRQ, /* Timer定時器軟中斷 */
NET_TX_SOFTIRQ, /* 發送網路數據包軟中斷 */
NET_RX_SOFTIRQ, /* 接收網路數據包軟中斷 */
BLOCK_SOFTIRQ, /* 塊設備軟中斷 */
IRQ_POLL_SOFTIRQ, /* 塊設備軟中斷 */
TASKLET_SOFTIRQ, /* tasklet軟中斷 */
SCHED_SOFTIRQ, /* 進程調度及負載均衡的軟中斷 */
HRTIMER_SOFTIRQ, /* Unused, but kept as tools rely on thenumbering. Sigh! */
RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq, RCU相關的軟中斷 */
NR_SOFTIRQS
};
/* 軟體中斷描述符,只包含一個handler函數指針 */
struct softirq_action {
void (*action)(struct softirq_action *);
};
/* 軟中斷描述符表,實際上就是一個全局的數組 */
static struct softirq_action softirq_vec[NR_SOFTIRQS] __cacheline_aligned_in_smp;
/* CPU軟中斷狀態描述,當某個軟中斷觸發時,__softirq_pending會置位對應的bit */
typedef struct {
unsigned int __softirq_pending;
unsigned int ipi_irqs[NR_IPI];
} ____cacheline_aligned irq_cpustat_t;
/* 每個CPU都會維護一個狀態信息結構 */
irq_cpustat_t irq_stat[NR_CPUS] ____cacheline_aligned;
/* 內核為每個CPU都創建了一個軟中斷處理內核線程 */
DEFINE_PER_CPU(struct task_struct *, ksoftirqd);
來一張圖吧:

softirq_vec[]數組,類比硬體中斷描述符表irq_desc[],通過軟中斷號可以找到對應的handler進行處理,比如圖中的tasklet_action就是一個實際的handler函數;- 軟中斷可以在不同的CPU上並行運行,在同一個CPU上只能串列執行;
- 每個CPU維護
irq_cpustat_t狀態結構,當某個軟中斷需要進行處理時,會將該結構體中的__softirq_pending欄位或上1UL << XXX_SOFTIRQ;
2.2 流程分析
2.2.1 軟中斷註冊
中斷處理流程中設備驅動通過request_irq/request_threaded_irq介面來註冊中斷處理函數,而在軟中斷處理流程中,通過open_softirq介面來註冊,由於它實在是太簡單了,我忍不住想把代碼貼上來:
void open_softirq(int nr, void (*action)(struct softirq_action *))
{
softirq_vec[nr].action = action;
}
也就是將軟中斷描述符表中對應描述符的handler函數指針指向對應的函數即可,以便軟中斷到來時進行回調。
那麼,問題來了,什麼時候進行軟中斷函數回調呢?
2.2.2 軟中斷執行之一:中斷處理後
先看第一種情況,用圖片來回答問題:
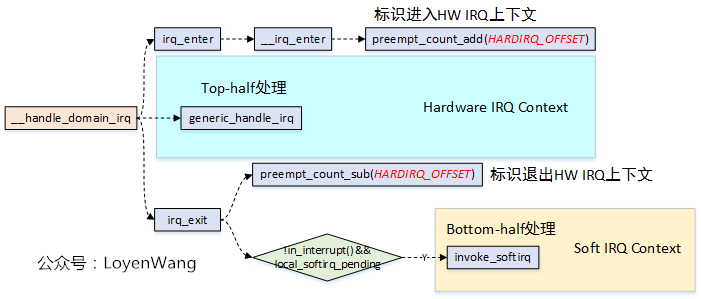
- Linux中斷子系統(二)-通用框架處理文章中講述了整個中斷處理流程,在接收到中斷信號後,處理器進行異常模式切換,並跳轉到異常向量表處進行執行,關鍵的流程為:
el0_irq->irq_handler->handle_arch_irq(gic->handle_irq)->handle_domain_irq->__handle_domain_irq; - 在
__handle_domain_irq函數中,irq_enter和irq_exit分別用於來標識進入和離開硬體中斷上下文處理,這個從preempt_count_add/preempt_count_sub來操作HARDIRQ_OFFSET可以看出來,這也對應到了上文中的Context描述圖; - 在離開硬體中斷上下文後,如果
!in_interrupt() && local_softirq_pending為真,則進行軟中斷處理。這個條件有兩個含義:1)!in_interrupt()表明不能處在中斷上下文中,這個範圍包括in_nmi、in_irq、in_softirq(Bottom-half disable)、in_serving_softirq,凡是處於這幾種狀態下,軟中斷都不會被執行;2)local_softirq_pending不為0,表明有軟中斷處理請求;
軟中斷執行的入口就是invoke_softirq,繼續分析一波:
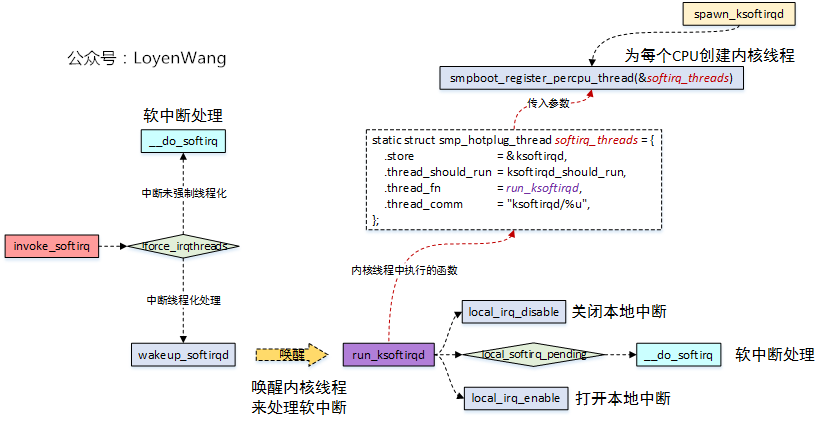
invoke_softirq函數中,根據中斷處理是否線程化進行分類處理,如果中斷已經進行了強制線程化處理(中斷強制線程化,需要在啟動的時候傳入參數threadirqs),那麼直接通過wakeup_softirqd喚醒內核線程來執行,否則的話則調用__do_softirq函數來處理;- Linux內核會為每個CPU都創建一個內核線程
ksoftirqd,通過smpboot_register_percpu_thread函數來完成,其中當內核線程運行時,在滿足條件的情況下會執行run_ksoftirqd函數,如果此時有軟中斷處理請求,調用__do_softirq來進行處理;
上圖中的邏輯可以看出,最終的核心處理都放置在__do_softirq函數中完成:
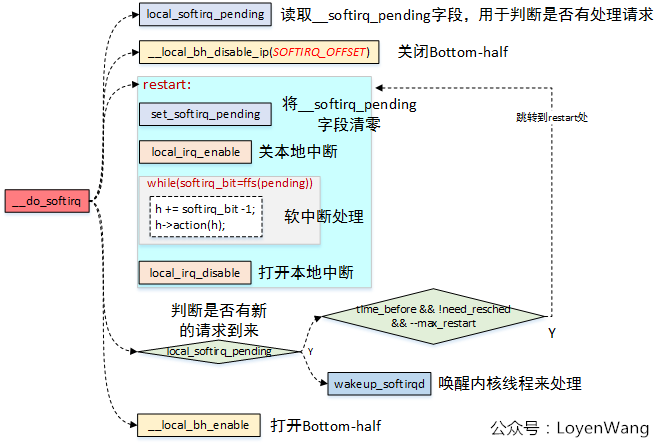
local_softirq_pending函數用於讀取__softirq_pending欄位,可以類比於設備驅動中的狀態寄存器,用於判斷是否有軟中斷處理請求;- 軟中斷處理時會關閉
Bottom-half,處理完後再打開; 軟中斷處理時,會打開本地中斷,處理完後關閉本地中斷,這個地方對應到上文中提到的Top-half和Bottom-half機制,在Bottom-half處理的時候,是會將中斷打開的,因此也就能繼續響應其他中斷,這個也就意味著其他中斷也能來打斷當前的Bottom-half處理;while(softirq_bit = ffs(pending)),迴圈讀取狀態位,直到處理完每一個軟中斷請求;- 跳出
while迴圈之後,再一次判斷是否又有新的軟中斷請求到來(由於它可能被中斷打斷,也就意味著可能有新的請求到來),有新的請求到來,則有三個條件判斷,滿足的話跳轉到restart處執行,否則調用wakeup_sotfirqd來喚醒內核線程來處理:time_before(jiffies, MAX_SOFTIRQ_TIME),軟中斷處理時間小於兩毫秒;!need_resched,當前沒有進程調度的請求;max_restart = MAX_SOFTIRQ_RESTART,跳轉到restart迴圈的次數不大於10次;
這三個條件的判斷,是基於延遲和公平的考慮,既要保證軟中斷儘快處理,又不能讓軟中斷處理一直占據系統,正所謂trade-off的藝術;
__do_softirq既然可以在中斷處理過程中調用,也可以在ksoftirqd中調用,那麼softirq的執行可能有兩種context,插張圖吧:

讓我們來思考最後一個問題:硬體中斷觸發的時候是通過硬體設備的電信號,那麼軟中斷的觸發是通過什麼呢?答案是通過raise_softirq介面:
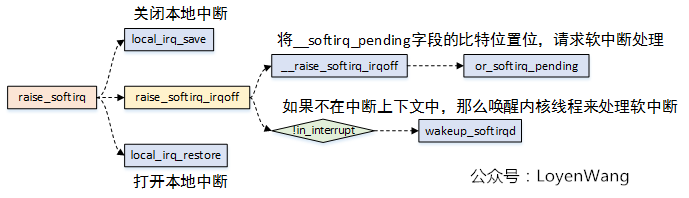
- 可以在中斷處理過程中調用
raise_softirq來進行軟中斷處理請求,處理的實際也就是上文中提到過的irq_exit退出硬體中斷上下文之後再處理; raise_softirq_irqoff函數中,最終會調用到or_softirq_pending,該函數會去讀取本地CPU的irq_stat中__softirq_pending欄位,然後將對應的軟中斷號給置位,表明有該軟中斷的處理請求;raise_softirq_irqoff函數中,會判斷當前的請求的上下文環境,如果不在中斷上下文中,就可以通過喚醒內核線程來處理,如果在中斷上下文中處理,那就不執行;- 多說一句,在軟中斷整個處理流程中,會經常看到
in_interrupt()的條件判斷,這個可以確保軟中斷在CPU上的串列執行,避免嵌套;
2.2.3 軟中斷執行之二:Bottom-half Enable後
第二種軟中斷執行的時間點,在Bottom-half使能的時候,通常用於併發處理,進程空間上下文中進行調用:

- 在討論併發專題的時候,我們談到過
Bottom-half與進程之間能產生資源爭奪的情況,如果在軟中斷和進程之間有臨界資源(軟中斷上下文優先順序高於進程上下文),那麼可以在進程上下文中調用local_bh_disable/local_bh_enable來對臨界資源保護; - 圖中左側的函數,都是用於打開
Bottom-half的介面,可以看出是spin_lock_bh/read_lock_bh/write_lock_bh等併發處理介面的變種形式調用; __local_bh_enable_ip函數中,首先判斷調用該本介面時中斷是否是關閉的,如果已經關閉了再操作BH介面就會告警;preempt_count_sub需要與preempt_count_add配套使用,用於操作thread_info->preempt_count欄位,加與減的值是一致的,而在__local_bh_enable_ip介面中,將cnt值的減操作分成了兩步:preempt_count_sub(cnt-1)和preempt_count_dec,這麼做的原因是執行完preempt_count_sub(cnt-1)後,thread_info->preempt_count欄位的值保留了1,把搶占給關閉了,當do_softirq執行完畢後,再調用preempt_count_dec再減去剩下的1,進而打開搶占;- 為什麼在使能
Bottom-half時要進行軟中斷處理呢?在併發處理時,可能已經把Bottom-half進行關閉了,如果此時中斷來了後,軟中斷不會被處理,在進程上下文中打開Bottom-half時,這時候就會檢查是否有軟中斷處理請求了;
3. tasklet
從上文中分析可以看出,tasklet是軟中斷的一種類型,那麼兩者有啥區別呢?先說結論吧:
- 軟中斷類型內核中都是靜態分配,不支持動態分配,而
tasklet支持動態和靜態分配,也就是驅動程式中能比較方便的進行擴展; - 軟中斷可以在多個CPU上並行運行,因此需要考慮可重入問題,而
tasklet會綁定在某個CPU上運行,運行完後再解綁,不要求重入問題,當然它的性能也就會下降一些;
3.1 數據結構

DEFINE_PER_CPU(struct tasklet_head, tasklet_vec)為每個CPU都分配了tasklet_head結構,該結構用來維護struct tasklet_struct鏈表,需要放到該CPU上運行的tasklet將會添加到該結構的鏈表中,內核中為每個CPU維護了兩個鏈表tasklet_vec和tasklet_vec_hi,對應兩個不同的優先順序,本文以tasklet_vec為例;struct tasklet_struct為tasklet的抽象,幾個關鍵欄位如圖所示,通過next來鏈接成鏈表,通過state欄位來標識不同的狀態以確保能在CPU上串列執行,func函數指針在調用task_init()介面時進行初始化,併在最終觸發軟中斷時執行;
3.2 流程分析
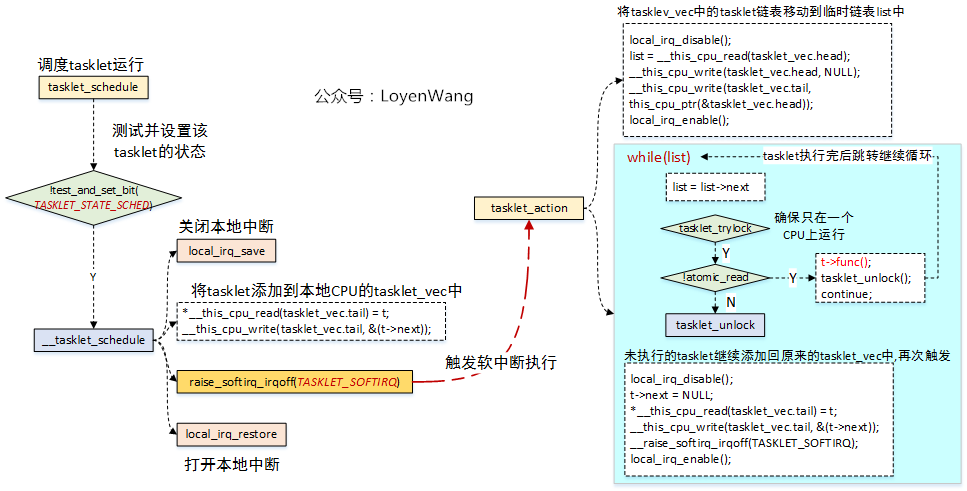
tasklet本質上是一種軟中斷,所以它的調用流程與上文中討論的軟中斷流程是一致的;- 調度
tasklet運行的介面是tasklet_schedule,如果tasklet沒有被調度則進行調度處理,將該tasklet添加到CPU對應的鏈表中,然後調用raise_softirq_irqoff來觸發軟中斷執行; - 軟中斷執行的處理函數是
tasklet_action,這個在softirq_init函數中通過open_softirq函數進行註冊的; tasklet_action函數,首先將該CPU上tasklet_vec中的鏈表挪到臨時鏈表list中,然後再對這個list進行遍歷處理,如果滿足執行條件則調用t->func()執行,並continue跳轉遍歷下一個節點。如果不滿足執行條件,則繼續將該tasklet添加回原來的tasklet_vec中,並再次觸發軟中斷;
3.3 介面
簡單貼一下介面吧:
/* 靜態分配tasklet */
DECLARE_TASKLET(name, func, data)
/* 動態分配tasklet */
void tasklet_init(struct tasklet_struct *t, void (*func)(unsigned long), unsigned long data);
/* 禁止tasklet被執行,本質上是增加tasklet_struct->count值,以便在調度時不滿足執行條件 */
void tasklet_disable(struct tasklet_struct *t);
/* 使能tasklet,與tasklet_diable對應 */
void tasklet_enable(struct tasklet_struct *t);
/* 調度tasklet,通常在設備驅動的中斷函數里調用 */
void tasklet_schedule(struct tasklet_struct *t);
/* 殺死tasklet,確保不被調度和執行, 主要是設置state狀態位 */
void tasklet_kill(struct tasklet_struct *t);
收工!
歡迎關註個人公眾號,不定期分享Linux內核機制文章。


