
本篇博客接著講解機器視覺的有關技術和知識。包括寬度測量,缺陷檢測,醫學處理。 一:寬度測量 在傳統的自動化生產中,對於尺寸的測量,典型的方法就是千分尺、游標卡尺、塞尺等。而這些測量手段測量精度低、速度慢,無法滿足大規模的自動化生產需求。基於機器視覺的尺寸測量屬於非接觸式的測量,具有檢測精度高、速度快 ...
本篇博客接著講解機器視覺的有關技術和知識。包括寬度測量,缺陷檢測,醫學處理。
一:寬度測量
在傳統的自動化生產中,對於尺寸的測量,典型的方法就是千分尺、游標卡尺、塞尺等。而這些測量手段測量精度低、速度慢,無法滿足大規模的自動化生產需求。基於機器視覺的尺寸測量屬於非接觸式的測量,具有檢測精度高、速度快、成本低、安裝簡便等優點。可以檢測零件的各種尺寸,如長度、圓、角度、線弧等測量。
利用python+opencv方法可以進行寬度的測量。步驟是先選取出一個矩形,然後進行閾值分割,再進行反色,邊緣提取之後進行點的選擇,輸出坐標做出兩條線段,根據線段進行矩形繪製,這樣之後就可以計算兩條直線之間的距離,也就是我們需要求得的寬度。
OpenCV是一個c++庫,用於實時處理電腦視覺方面的問題,涵蓋了很多電腦視覺領域的模塊。配合python調用c++庫,可以很方便地進行寬度測量,實現要求。
步驟如下:
1.導入需要的庫
import cv2
import cv2 as cv
import numpy as np
import imutils
2.讀取原圖像查看
img = cv2.imread("1.jpg")

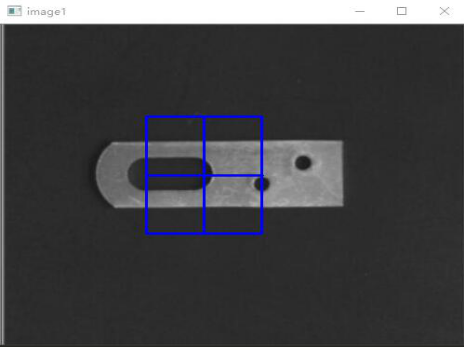
3.截取部分圖像
手動地進行選取我們感興趣的部分,然後截取出來。
img = imutils.resize(img, width=500)
roi = cv2.selectROI(windowName="image1", img=img, showCrosshair=True, fromCenter=False)
x, y, w, h = roi
cv2.rectangle(img=img, pt1=(x, y), pt2=(x + w, y + h), color=(0, 0, 255), thickness=2)
s = img[y:y+h,x:x+w]
4.反色
截取後會出現空白區域很多黑色的情況,需要進行反色,用到的方法是255去除值。
# 反色
def colorReverse(src):
height, width, channels = src.shape
for row in range(height):
for list in range(width):
for c in range(channels):
pv = src[row, list, c]
src[row, list, c] = 255 - pv
return src
src = colorReverse(s)
5.邊緣檢測去噪
x = cv2.Sobel(src,cv2.CV_16S,1,0)
y = cv2.Sobel(src,cv2.CV_16S,0,1)
absX = cv2.convertScaleAbs(x) # 轉回uint8
absY = cv2.convertScaleAbs(y)
dst = cv2.addWeighted(absX,0.5,absY,0.5,0)
result = colorReverse(dst)
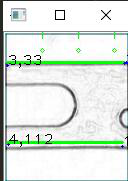
6.輸出滑鼠選擇點的坐標
之後進行的操作是利用滑鼠選擇點,並顯示坐標,可以判斷時候用滑鼠進行點擊操作,如果是的話,就可以輸出點的坐標在輸出框或者圖片上標記,把點擊函數作為參數,就可以在不點擊退出鍵的時候進行迴圈遞歸操作,知道最直到獲得想要點的坐標。
# 輸出滑鼠選擇點的坐標
# setMouseCallback使用的回調函數,這個回調函數在捕獲到滑鼠左鍵點擊事件時,就在圖片上點擊處繪製一個實心的圓、並顯示出坐標。
def on_EVENT_LBUTTONDOWN(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
xy = "%d,%d" % (x, y)
print (xy)
cv2.circle(result, (x, y), 1, (255, 0, 0), thickness = -1)
cv2.putText(result, xy, (x, y), cv2.FONT_HERSHEY_PLAIN,
1.0, (0,0,0), thickness = 1)
cv2.imshow("image2", result)
cv2.namedWindow("image2")
cv2.setMouseCallback("image2", on_EVENT_LBUTTONDOWN)
cv2.imshow("image2", result)
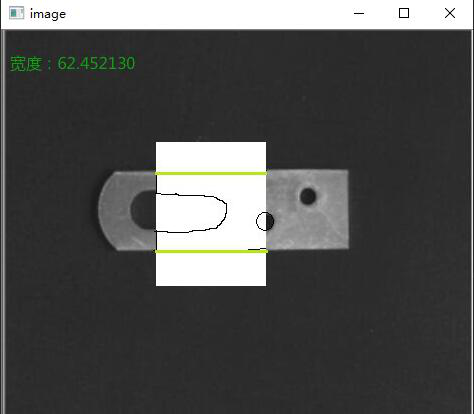
7.繪製線段用輸出提示
接下來就可以根據選擇的四個點進行連接輸出線段,用get_len()方法可以得到兩條線之間的距離。
# 繪製線段
s = cv2.line(result,(3, 30), (120, 30), (0, 255, 0), 2)
d = cv2.line(result,(3, 110), (118, 110), (0,255, 0), 2)
lens = s.get_len() - d.get_len()
# 輸出圖形
text = "寬為:{0}".format(lens)
cv.putText(result, text, (20, 20), cv.FONT_HERSHEY_COMPLEX, 2.0, (0, 255, 0), 1)
二:缺陷檢測
缺陷檢測通常是指對物品錶面缺陷的檢測,錶面缺陷檢測是採用先進的機器視覺檢測技術,對工件錶面的斑點、凹坑、劃痕、色差、缺損等缺陷進行檢測。
人工檢測是產品錶面缺陷的傳統檢測方法,該方法抽檢率低、準確性不高、實時性差、效率低、勞動強度大、受人工經驗和主觀因素的影響大,而基於機器視覺的檢測方法可以很大程度上剋服上述弊端。
缺陷檢測被廣泛使用於布匹瑕疵檢測、工件錶面質量檢測、航空航天領域等。傳統的演算法對規則缺陷以及場景比較簡單的場合,能夠很好工作,但是對特征不明顯的、形狀多樣、場景比較混亂的場合,則不再適用。近年來,基於深度學習的識別演算法越來越成熟,許多公司開始嘗試把深度學習演算法應用到工業場合中。
視覺錶面缺陷檢測系統基本組成主要包括圖像獲取模塊、圖像處理模塊、圖像分析模塊、數據管理及人機介面模塊。
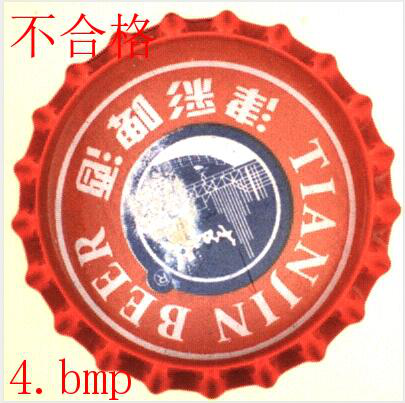
這裡是用python+opencv進行津彩啤酒的圖片缺陷檢測,將0.bmp圖片進行樣本,和其他圖片進行對比,檢測是否合格。通過對比原圖和要比較的圖像的24位灰度圖像進行檢測。
步驟如下:
1.導入需要的庫
import cv2
import cv2 as cv
import numpy as np
from PIL import Image, ImageDraw, ImageFont
2.比較
讀入我們0.bmp圖像作為比較因數,設置為rgbimage_std變數
rgbimage_std = cv.imread("0.bmp")

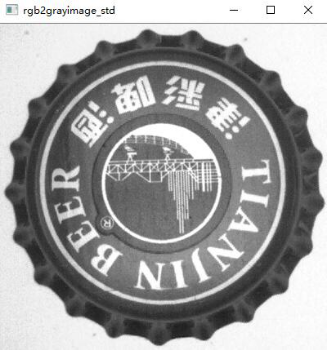
3.轉換
將24位rgbimage_std彩色圖像轉換為8位rgb2grayimage_std灰度圖像
rgb2grayimage_std = cv2.cvtColor(rgbimage_std, cv2.COLOR_RGB2GRAY)
4.迴圈
缺陷檢測演算法迴圈六次。
imagename = str(i) + '.bmp'
rgbimage_defect = cv.imread(imagename)
# 將每次imagename對應圖像在圖像視窗顯示出來
# cv.imshow(imagename, rgbimage_defect)
# 將24位rgbimage_defect彩色圖像轉換8位rgb2grayimage_defect灰度圖
gray = np.array(rgbimage_defect)
gray = gray[:,:,0]
rgb2grayimage_defect = np.array([gray,gray,gray])
rgb2grayimage_defect = np.transpose(rgb2grayimage_defect,(1,2,0))
name = str(i) + '_rgb2grayimage_defect.bmp'
# cv.imshow(name, rgb2grayimage_defect)
# 缺陷比較
# 直方圖計算的函數,反應灰度值的分佈情況
be_compare_image = cv2.calcHist([rgb2grayimage_std], [0], None, [256], [0.0,255.0])
compare_image = cv2.calcHist([rgb2grayimage_defect], [0], None, [256], [0.0,255.0])
#相關性計算,採用相關係數的方式
# result = cv2.compareHist(be_compare_image,compare_image,method=cv2.HISTCMP_CORREL)
result = sum(be_compare_image - compare_image)[0]
# 打開PIL創建的圖像
ss = Image.open(str(i) + ".bmp")
# 創建一個操作對象
draw = ImageDraw.Draw(ss)
# 字體對象為simsun,字大小為50號
fnt = ImageFont.truetype(r'C:\Windows\Fonts\simsun.ttc', 50)
# 如果圖片對比原圖相似度小於7,則合格;否則不合格。
if result < 7:
draw.text((5, 10), u'合格', fill='red', font=fnt)
th_str = str(i) + '.bmp'
draw.text((5, 350), th_str, fill='red', font=fnt)
else:
draw.text((5, 10), u'不合格', fill='red', font=fnt)
th_str = str(i) + '.bmp'
draw.text((5, 350), th_str, fill='red', font=fnt)
ss.show("result" +str(i) + ".png")







5.結束代碼
cv.waitKey(0)
三:醫學檢測
醫學信息處理,即對醫學信息的處理,醫學信息處理過程中藉助電腦技術,具有非常高的應用價值,在提高信息處理準確度的同時,也極大地增強了信息處理的效率,為廣大患者與患者家屬創造更為人性化的就醫環境。
利用電腦的先進技術可以對醫學圖像進行處理,然後更加方便地得到圖片上蘊含的信息,從而進行正快速地得到我們想要得到的信息。
這裡是用python+opencv進行醫學圖像識別,藉助電腦技術幫助醫生對醫學圖像進行有效地分析。
步驟如下:
1.導入庫
from skimage import data,color,morphology
import cv2 as cv
import cv2
2.讀入灰度圖
img1 = cv.imread('vas0.bmp',0)

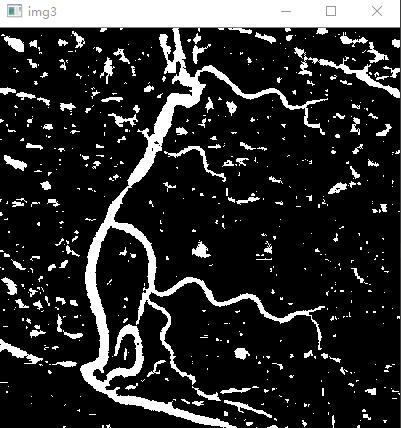
3.反色
img3 = img2.copy()
cv2.threshold(img2,80,255,0,img2)
for i in range(0,img2.shape[0]):
for j in range(0,img2.shape[1]):
img3[i,j] = 255-img2[i,j]
或者如下代碼:
# 對img2圖像圖像進行反色,得到img3圖像
def access_pixels(image):
height, width, channels = image.shape
for row in range(height):
for list in range(width):
for c in range(channels):
pv = image[row, list, c]
image[row, list, c] = 255 - pv
return image
img3 = access_pixels(img2)

4.擴展
img4 = cv2.copyMakeBorder(img3,50,50,50,50,cv2.BORDER_REFLECT)

5.去噪
去除雜訊位置地小面積區域,可以有兩種方式,一種是選擇滿足面積150-10000的img4圖像輸出,去除雜訊位置元素,另一種是使用Skimage中的形態學處理來進行孤立小區域的去除。
img5 = morphology.remove_small_holes(img4, 100)
或者如下代碼:
contours,hierarchy = cv2.findContours(img4, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
#消除小面積
for i in range(len(contours)):
area = cv2.contourArea(contours[i])
if area < 150:
cv2.drawContours(img4,[contours[i]],0,0,-1)
img5 = img4
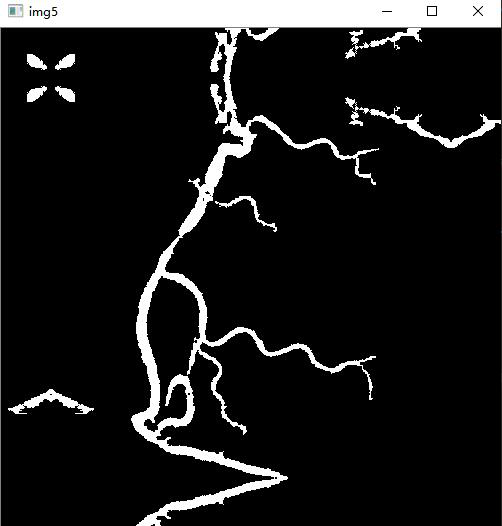
6.面積濾波
用連通區域的面積除以連通區域包絡盒的面積,僅保留當這個比值小於用戶所給的div的值時的連通區域。
img5=img5.copy()
contours1,hierarchy = cv2.findContours(img5, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
for j in range(len(contours1)):
area1 = cv2.contourArea(contours1[j])
print(area1)
if area1 ==157.0:
cv2.drawContours(img5,[contours1[j]],0,0,-1)
elif area1==261.5:
cv2.drawContours(img5,[contours1[j]],0,0,-1)
elif area1==568.0:
cv2.drawContours(img5,[contours1[j]],0,0,-1)

7.細化函數
輸入需要細化的圖片(經過二值化處理的圖片)和映射矩陣array,並提取骨架。
def Thin(image, array):
h, w = image.shape
iThin = image
for i in range(h):
for j in range(w):
if image[i, j] == 0:
a = [1] * 9
for k in range(3):
for l in range(3):
# 如果3*3矩陣的點不在邊界且這些值為零,也就是黑色的點
if -1 < (i - 1 + k) < h and -1 < (j - 1 + l) < w and iThin[i - 1 + k, j - 1 + l] == 0:
a[k * 3 + l] = 0
sum = a[0] * 1 + a[1] * 2 + a[2] * 4 + a[3] * 8 + a[5] * 16 + a[6] * 32 + a[7] * 64 + a[8] * 128
iThin[i, j] = array[sum] * 255
return iThin
# 映射表
array = [0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 1, 1, 1, 0, 1,\
1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1,\
0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 1, 1, 1, 0, 1,\
1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1,\
1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,\
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,\
1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 1, 1, 1, 0, 1,\
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,\
0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 1, 1, 1, 0, 1,\
1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1,\
0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 1, 1, 1, 0, 1,\
1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0,\
1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,\
1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0,\
1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 1, 1, 1, 0, 0,\
1, 1, 0, 0, 1, 1, 1, 0, 1, 1, 0, 0, 1, 0, 0, 0]
src = cv2.imread(r'img5.png', 0)
Gauss_img = cv2.GaussianBlur(src, (3,3), 0)
# 自適應二值化函數,需要修改的是55那個位置的數字,越小越精細,細節越好,噪點更多,最大不超過圖片大小
adap_binary = cv2.adaptiveThreshold(Gauss_img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY,3,2)
img6 = Thin(adap_binary, array)
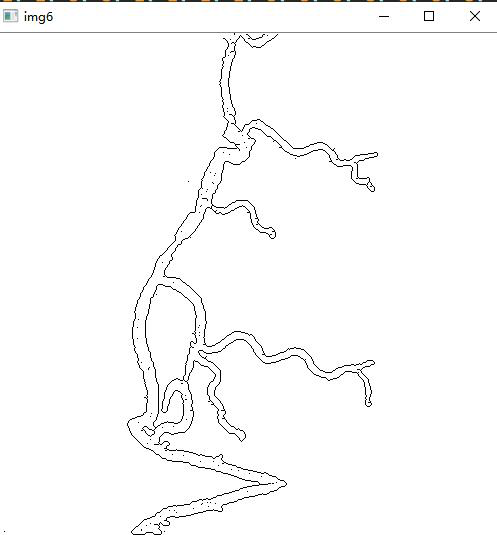
8.邊緣檢測
img7 = cv2.Canny(img6,80,255)

9.圖片反色
img8 = img7.copy()
cv2.threshold(img7,80,255,0,img7)
for i in range(0,img7.shape[0]):
for j in range(0,img7.shape[1]):
img8[i,j] = 255-img7[i,j]

10.結束函數
cv.waitKey(0)


