
這兩天新型肺炎病例是指數上升啊!呆在家裡沒事幹,正好想起之前FPGA大賽上有個老哥做了一個圖像旋轉作品,還在群里發了技術報告。無聊之下就打算學習一下,然後就順便把平移、旋轉、縮放這些幾何變換都看了,最後決定把這三個綜合起來寫個“旋轉傻烏龜”的動畫。先是用OpenCV內置函數實現了下,感覺不過癮,又自 ...
這兩天新型肺炎病例是指數上升啊!呆在家裡沒事幹,正好想起之前FPGA大賽上有個老哥做了一個圖像旋轉作品,還在群里發了技術報告。無聊之下就打算學習一下,然後就順便把平移、旋轉、縮放這些幾何變換都看了,最後決定把這三個綜合起來寫個“旋轉傻烏龜”的動畫。先是用OpenCV內置函數實現了下,感覺不過癮,又自己寫了一遍。老規矩,還是把學過的、做過的東西記錄下來!
旋轉傻烏龜,效果就是將一隻烏龜在視窗中同時進行平移、縮放和旋轉,由於最後看起來樣子比較傻,因此得名“旋轉傻烏龜”。
效果視頻:
一、幾何變換的矩陣表示
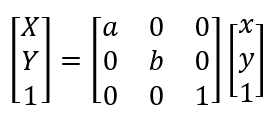
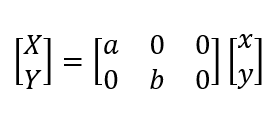
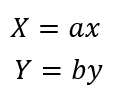
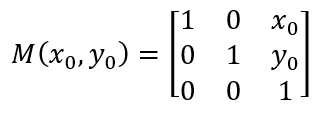
1.1 平移的表示
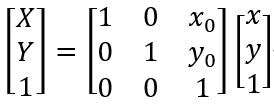
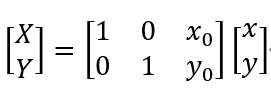
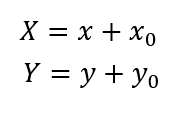
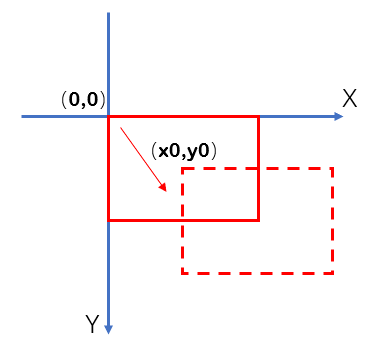
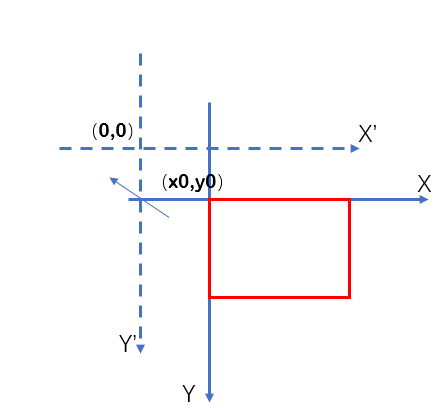
上圖中的三種表示方法第二種是OpenCV要求的方式,但第一種形式表示起來更具統一性,因此我更傾向於第一種。但無論哪一種,都能展開成第三種的形式。第三種非常直觀的反映了平移,只是需要註意正負號的選取——在編程中,圖像一般以左上角為(0,0)點。這也就是說,建立坐標系的時候,X軸以右正方向,Y軸以下為正方向。以上矩陣表示將圖像向右平移x0,向下平移y0,也可以認為是將坐標系向左平移x0,向上平移y0。平移可以形象地表示如下:
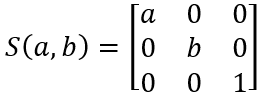
1.2 以左上角為定點縮放的表示
縮放最容易理解,就是將橫縱坐標乘以縮放比例。由於我們以左上角為坐標系原點,所以左上角點的位置並不會變化。
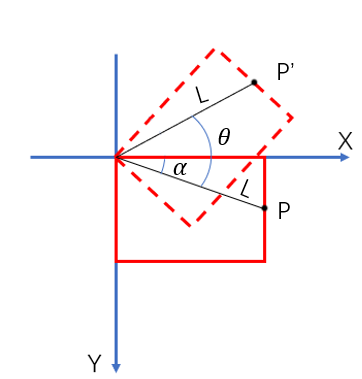
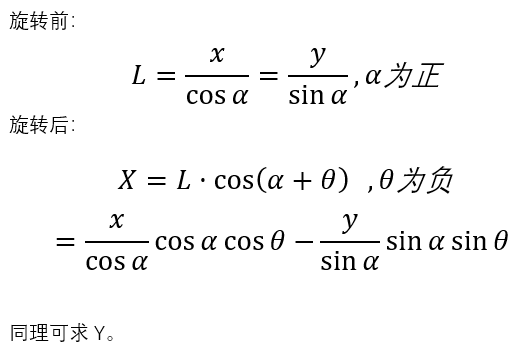
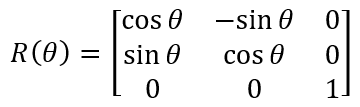
1.3 以左上角點為中心旋轉的表示
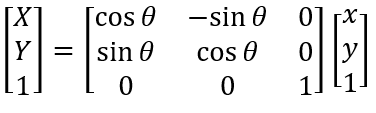
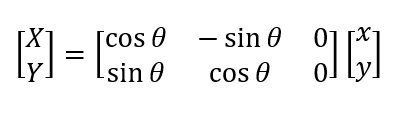
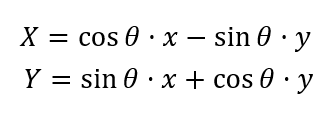
在本文中,規定順時針方向旋轉,θ為正;逆時針旋轉,θ為負。旋轉前後的坐標關係推導也不難,如下圖所示,旋轉前先求出旋轉半徑L,旋轉後根據L求出坐標。
為了之後表述的簡潔,我們將這三節中的矩陣分別用特定符號簡記:
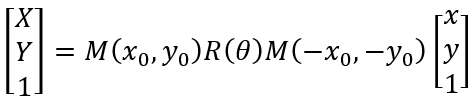
1.4 以任一點為中心旋轉的表示
有了以上的基礎,我們就可以研究更加複雜的變換。例如我們想以任一點(x0,y0)為中心旋轉,而我們推導的R(θ)只適用於以坐標系原點為中心旋轉。因此,我們可以將圖像向上平移x0,向左平移y0,使(x0,y0)點平移到坐標系原點;然後再旋轉,旋轉完後再向下平移x0,向右平移y0回到原來位置,這一過程可用三個基礎基礎矩陣表示成如下形式,註意三個矩陣順序不能調換。
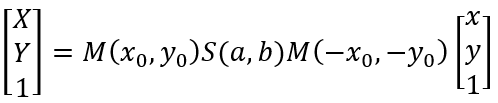
1.5 以任一點為定點縮放的表示
方法同1.4節的旋轉,可以表示為下麵形式。除此之外,還可以在此基礎上進行旋轉平移,只要在左邊依次乘上相應矩陣即可。
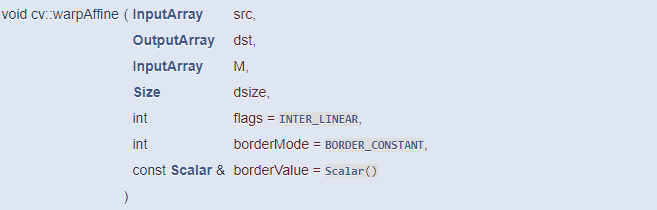
二、旋轉傻烏龜OpenCV函數實現
OpenCV提供了仿射變換函數warpAffine。在輸入參數中,M表示變換矩陣,可以是平移、旋轉和縮放矩陣等;dsize是輸入圖像的大小;flags是插值方式,一般採用預設的雙線性插值。
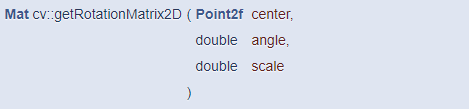
至於M的獲取,平移矩陣只能自己構造;二旋轉矩陣可以由函數getRotationMatrix2D得到。輸入參數中,center表示旋轉中心的坐標;angle為旋轉角度,逆時針為正;scale是縮放比例。可見這個函數同時包攬了旋轉和縮放的功能。
我的思路是,用正弦函數生成一系列軌跡點,烏龜每到達一個軌跡點,就旋轉一定角度,縮放一定比例,而軌跡點的跟蹤就是烏龜中心的平移。根據之前的說的原理,我們先讓整個圖像繞自身中心旋轉和縮放,縮放後的烏龜應該是在整個圖像的中間,為了讓它中心和軌跡重合,就使用平移變換,此時平移的距離應該是path-center。整個過程的代碼如下:
1 import cv2 2 import numpy as np 3 import time 4 5 img = cv2.imread('image/turtle.jpg') 6 size = img.shape[:-1] 7 cv2.namedWindow('img') 8 9 #平移矩陣 10 def GetMoveMatrix(x,y): 11 M = np.zeros((2, 3), dtype=np.float32) 12 13 M.itemset((0, 0), 1) 14 M.itemset((1, 1), 1) 15 M.itemset((0, 2), x) 16 M.itemset((1, 2), y) 17 18 return M 19 20 if __name__ == '__main__': 21 22 # shape和坐標是顛倒的 23 center_x = size[1]/2 24 center_y = size[0]/2 25 #計時 26 start_time = time.time() 27 28 for x in np.linspace(0,2*np.pi,100): 29 #角度、縮放 30 angle = -360*x/2/np.pi 31 scale = 0.2+0.2*np.sin(x) 32 #軌跡 33 path_x = x*50+100 34 path_y = (np.sin(x)+1)*100+100 35 #旋轉、平移矩陣 36 M1 = cv2.getRotationMatrix2D((center_x, center_y), angle, scale) 37 M2 = GetMoveMatrix(path_x-center_x,path_y-center_y) 38 #仿射變換 39 rotate = cv2.warpAffine(img,M1,size) 40 dst = cv2.warpAffine(rotate,M2,size) 41 42 # cv2.imshow('img',dst) 43 # cv2.waitKey(1) 44 #花費125ms 45 print(time.time()-start_time)
三、旋轉傻烏龜自實現
這個自己用Python實現的話,性能就相當重要了,尤其是雙線性插值,如果不優化的話,慢得簡直可以讓你懷疑人生。比如,一般的是用兩個for迴圈迭代,代碼如下。在這個項目里,這個函數執行一次需要花費1.4s的時間。所以不優化的話,這隻烏龜真的是名副其實了!
1 def InterLinearMap(img,size,mapx,mapy): 2 3 dst = np.zeros(img.shape,dtype=np.uint8) 4 5 for row in range(size[0]): 6 for col in range(size[1]): 7 8 intx = np.int32(mapx.item(row,col)) 9 inty = np.int32(mapy.item(row,col)) 10 partx = mapx.item(row,col)-intx 11 party = mapy.item(row,col)-inty 12 resx = 1-partx 13 resy = 1-party 14 15 if party==0 and partx==0: 16 result=img[inty,intx] 17 else: 18 result = ((img[inty,intx]*resx+img[inty,intx+1]*partx)*resy 19 +(img[inty+1,intx]*resx+img[inty+1,intx+1]*partx)*party) 20 21 dst[row,col]=np.uint8(result+0.5) 22 23 return dst
那怎麼辦?網上有一些優化的方法,主要是將浮點運算轉成整數運算,這個方法對於FPGA這樣的邏輯器件最適合不過了——但別忘了,我現在用的是Python,整數運算實際上也會被轉成浮點運算,所以這個方法顯然不適用。我採用的優化是進行矩陣化,據我所知,很多編程語言只要是支持矩陣運算的,其運算都是優化過的。對於雙線性插值和仿射變換,運用矩陣也是很合適,只是寫起來會有點抽象。。。
首先,先把生成變換矩陣的函數寫出來,代碼如下。要註意numpy的三角函數接受的參數是弧度制。
1 #縮放矩陣 2 def GetResizeMatrix(scalex,scaley): 3 M = np.zeros((3,3),dtype=np.float32) 4 5 M.itemset((0,0),scalex) 6 M.itemset((1,1),scaley) 7 M.itemset((2,2),1) 8 9 return M 10 #平移矩陣 11 def GetMoveMatrix(x,y): 12 M = np.zeros((3, 3), dtype=np.float32) 13 14 M.itemset((0, 0), 1) 15 M.itemset((1, 1), 1) 16 M.itemset((2, 2), 1) 17 M.itemset((0, 2), x) 18 M.itemset((1, 2), y) 19 20 return M 21 #旋轉矩陣 22 def GetRotationMatrix(angle): 23 M = np.zeros((3, 3), dtype=np.float32) 24 25 M.itemset((0, 0), np.cos(angle)) 26 M.itemset((0, 1), -np.sin(angle)) 27 M.itemset((1, 0), np.sin(angle)) 28 M.itemset((1, 1), np.cos(angle)) 29 M.itemset((2, 2), 1) 30 31 return M
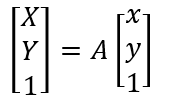
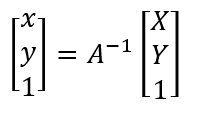
接下來寫仿射變換函數,輸入參數為圖片數據、變換矩陣和輸入圖片的大小。這裡應該要有逆向思維——現在我要得到變換後的圖片,就是要求各坐標位置上的色彩,而色彩取樣自變換前圖像上的一點(這點的坐標可能不是整數),也就是說我們要將變換後的坐標映射到變換前的坐標。再來看之前的公式(下圖左,為了方便,將變換矩陣合成為一個矩陣A),現在我們已知的是左邊部分,而要求的映射是等式右邊的XY,因此我們將A拿到左邊,得到另一個公式(下圖右),並依據這個公式,寫出仿射變換函數。
1 def WarpAffine(img,Mat,size): 2 3 rows = size[0] 4 cols = size[1] 5 #生成矩陣[X Y 1] 6 ones = np.ones((rows, cols), dtype=np.float32) 7 #gridx/gridy -> shape(rows,cols) 8 gridx,gridy= np.meshgrid(np.arange(0, cols),np.arange(0, rows)) 9 #dst -> shape(3,rows,cols) 10 dst = np.stack((gridx, gridy, ones)) 11 12 #求逆矩陣 M -> shape(3,3) 13 Mat = np.linalg.inv(Mat) 14 #獲得矩陣[x,y,1] -> shape(3,rows,cols) 15 src = np.tensordot(Mat,dst,axes=[[-1],[0]]) 16 17 #mapx/mapy -> shape(rows,cols) 18 mapx = src[0]#坐標非整數 19 mapy = src[1]#坐標非整數 20 #仿射出界的設為原點 21 flags = (mapy > rows - 2) + (mapy < 0) + (mapx > cols - 2) + (mapx < 0) 22 mapy[flags] = 0 23 mapx[flags] = 0 24 #雙線性插值 25 26 result = InterLinearMap(img, mapx, mapy) 27 28 return result
再解決雙線性插值,關於該演算法的原理挺簡單的,讀者可以網上查找(提一點,理解雙線性插值時可以想象3D模型,Z軸為灰度值)。對於該函數,借鑒一下remap函數,輸入參數設兩個map,分別表示x,y的映射。map的大小跟圖片大小相同,也就是說,一共有rows*cols點需要插值,除了用兩個for迭代,我們也可以將rows和cols作為矩陣的兩個額外維度,表示樣本數。計算的話,利用矩陣的點乘代替凌亂的長算式,顯得很簡潔,公式如下:

代碼如下,經測試,執行一次該函數,花費時間為45ms,這要比原來的1.4s快多了(實在不知道該怎麼進一步優化了,mxy、img下表索引、求和各花了15ms)
def InterLinearMap(img,mapx,mapy): #(rows,cols) inty = np.int32(mapy) intx = np.int32(mapx) nxty = 1+inty nxtx = 1+intx #(rows,cols) party = mapy - inty partx = mapx - intx resy = 1-party resx = 1-partx #(4,rows,cols) mxy = np.stack((resy*partx,resy*resx,partx*party, resx*party)) mxy = np.expand_dims(mxy,axis=-1) #(4,rows,cols,3) mf = np.stack((img[inty,nxtx],img[inty,intx],img[nxty,nxtx],img[nxty,intx])) #res -> shape(rows,cols,3) res = np.sum(mxy*mf,axis=0) res = np.uint8(res+0.5) return res
綜上,給出完整代碼:
import cv2 import numpy as np img = cv2.imread('image/turtle.jpg') size = img.shape[:-1] cv2.namedWindow('img') #縮放矩陣 def GetResizeMatrix(scalex,scaley): M = np.zeros((3,3),dtype=np.float32) M.itemset((0,0),scalex) M.itemset((1,1),scaley) M.itemset((2,2),1) return M #平移矩陣 def GetMoveMatrix(x,y): M = np.zeros((3, 3), dtype=np.float32) M.itemset((0, 0), 1) M.itemset((1, 1), 1) M.itemset((2, 2), 1) M.itemset((0, 2), x) M.itemset((1, 2), y) return M #旋轉矩陣 def GetRotationMatrix(angle): M = np.zeros((3, 3), dtype=np.float32) M.itemset((0, 0), np.cos(angle)) M.itemset((0, 1), -np.sin(angle)) M.itemset((1, 0), np.sin(angle)) M.itemset((1, 1), np.cos(angle)) M.itemset((2, 2), 1) return M def InterLinearMap(img,mapx,mapy): #(rows,cols) inty = np.int32(mapy) intx = np.int32(mapx) nxty = 1+inty nxtx = 1+intx #(rows,cols) party = mapy - inty partx = mapx - intx resy = 1-party resx = 1-partx #(4,rows,cols) mxy = np.stack((resy*partx,resy*resx,partx*party, resx*party)) mxy = np.expand_dims(mxy,axis=-1) #(4,rows,cols,3) mf = np.stack((img[inty,nxtx],img[inty,intx],img[nxty,nxtx],img[nxty,intx])) #res -> shape(rows,cols,3) res = np.sum(mxy*mf,axis=0) res = np.uint8(res+0.5) return res def WarpAffine(img,Mat,size): rows = size[0] cols = size[1] #生成矩陣[X Y 1] ones = np.ones((rows, cols), dtype=np.float32) #gridx/gridy -> shape(rows,cols) gridx,gridy= np.meshgrid(np.arange(0, cols),np.arange(0, rows)) #dst -> shape(3,rows,cols) dst = np.stack((gridx, gridy, ones)) #求逆矩陣 M -> shape(3,3) Mat = np.linalg.inv(Mat) #獲得矩陣[x,y,1] -> shape(3,rows,cols) src = np.tensordot(Mat,dst,axes=[[-1],[0]]) #mapx/mapy -> shape(rows,cols) mapx = src[0]#坐標非整數 mapy = src[1]#坐標非整數 #仿射出界的設為原點 flags = (mapy > rows - 2) + (mapy < 0) + (mapx > cols - 2) + (mapx < 0) mapy[flags] = 0 mapx[flags] = 0 #雙線性插值 result = InterLinearMap(img, mapx, mapy) return result if __name__ == '__main__': center_x = size[1]/2 center_y = size[0]/2 for x in np.linspace(0,2*np.pi,100): angle = 360*x/2/np.pi scale = 0.2+0.2*np.sin(x) path_x = x*50+100 path_y = (np.sin(x)+1)*100+100 M = GetMoveMatrix(path_x,path_y)@GetRotationMatrix(x)\ @GetResizeMatrix(scale,scale)@GetMoveMatrix(-center_x,-center_y) dst = WarpAffine(img,M,size) cv2.imshow('img',dst) cv2.waitKey(1)

