
電機是重要的執行機構,可以將電轉轉化為機械能,從而驅動北控設備的轉動或者移動,在我們的生活中應用非常廣泛。例如,應用在電動工具、電動平衡車、電動園林工具、兒童玩具中。直流電機的實物圖如下圖所示。 1-直流電機實物圖 對於普通的直流電機,在其兩個電極上接上合適的直流電源後,電機就可以滿速轉動,電源反接 ...
電機是重要的執行機構,可以將電轉轉化為機械能,從而驅動北控設備的轉動或者移動,在我們的生活中應用非常廣泛。例如,應用在電動工具、電動平衡車、電動園林工具、兒童玩具中。直流電機的實物圖如下圖所示。

1-直流電機實物圖
對於普通的直流電機,在其兩個電極上接上合適的直流電源後,電機就可以滿速轉動,電源反接後,電機就反向轉動。但是在實際應用中,我們需要電機工作在不同的轉速下,該如何操作呢?
1 直流電機的調速原理
我們可以做這樣的實驗,以24V直流電機為例,在電機兩端接上24V的直流電源,電機會以滿速轉動,如果將24V電壓降至2/3即16V,那麼電機就會以滿速的2/3轉速運轉。由此可知,想要調節電機的轉速,只需要控制電機兩端的電壓即可。
以三極體作為驅動器件驅動小功率的電機,其電路原理圖如下圖所示。電機作為負載接在三極體的集電極上,基極由單片機控制。
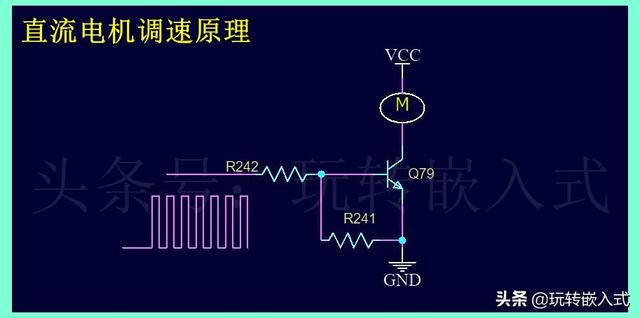
2-直流電機調速原理圖
當單片機輸出高電平時,三極體導通,使得電機得電,從而滿速運行;當單片機輸出低電平時,三極體截止,電機兩端沒有電壓,電機停止轉動。那如何使電機兩端的電壓發生變化,進而控制電機的轉速呢?
只要單片機輸出占空比可調的方波,即PWM信號即可控制電機兩端的電壓發生變化,從而實現電機轉速的控制。
2 PWM信號調速的原理
所謂PWM,就是脈衝寬度調製技術,其具有兩個很重要的參數:頻率和占空比。頻率,就是周期的倒數;占空比,就是高電平在一個周期內所占的比例。PWM方波的示意圖如下圖所示。

3-PWM的基本參數
在上圖中,頻率F的值為1/(T1+T2),占空比D的值為T1/(T1+T2)。通過改變單位時間內脈衝的個數可以實現調頻;通過改變占空比可以實現調壓。占空比越大,所得到的平均電壓也就越大,幅值也就越大;占空比越小,所得到的平均電壓也就越小,幅值也就越小。動圖演示如圖4所示。
4-PWM調壓演示
通過以上原理就可以知道,只要改變PWM信號的占空比,就可以改變直流電機兩端的平均電壓,從而實現直流電機的調速。
前文說過,改變電機兩端的電源極性可以改變電機的轉速,那麼電路如何實現電機的正反轉調速呢?這需要通過H橋電路來實現。H橋的電路原理如下圖所示。
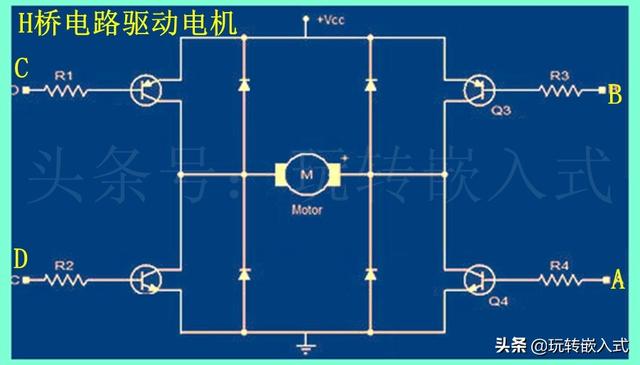
5-H橋驅動電機電路
H橋電路由四個功率電子開關構成,可以是晶體管也可以是MOS管。電子開關兩兩構成橋臂,在同一時刻只要對角的兩個電子開關導通,另外兩個截止,且每個橋臂的上下管不能同時導通。通過這個電路就可以實現電機的正反轉調速。
3 PWM如何實現電機的正轉調速
要實現電機的正轉只需要做如下設置即可:
A控制端:高電平,控制三極體Q4導通;
B控制端:高電平,控制三極體Q3截止;
C控制端:低電平,控制三極體Q1導通;
D控制端:低電平,控制三極體Q2截止;
通過以上操作,即實現三極體Q2和Q3截止,三極體Q1和Q4導通,電流的流向如下:
VCC→Q1→電機→Q4→GND,實現了電機的正轉。
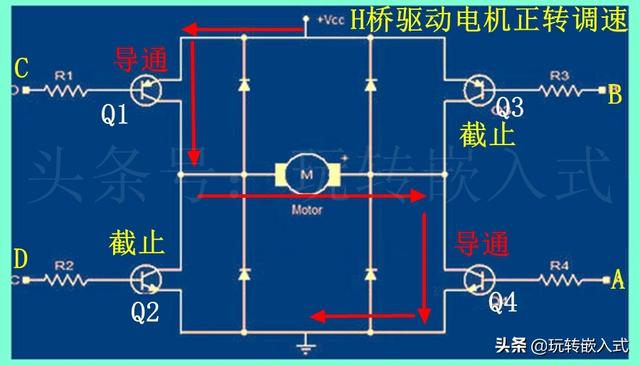
6-H橋驅動電機正轉調速電路
在這種情況下要實現電機轉速的調節,只需要給Q4的基極載入PWM信號即可。
4 PWM如何實現電機的反轉調速
要實現電機的反轉只需要做如下設置即可:
A控制端:低電平,控制三極體Q4截止;
B控制端:低電平,控制三極體Q3導通;
C控制端:高電平,控制三極體Q1截止;
D控制端:高電平,控制三極體Q2導通;
通過以上操作,即實現三極體Q1和Q4截止,三極體Q2和Q3導通,電流的流向如下:
VCC→Q3→電機→Q2→GND,實現了電機的反轉。
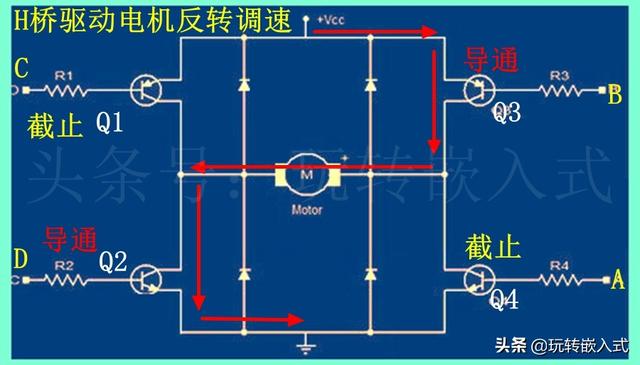
7-H橋驅動電機反轉調速電路
在這種情況下要實現電機轉速的調節,只需要給Q2的基極載入PWM信號即可。
5 電機專用驅動IC和分離元器件電路的對比
目前有很多電機專用驅動IC,體積小、控制簡單,比用分離元器件所搭建的電路占有更大的優勢。
專用IC優勢之一:死區控制更容易
使用分離元器件時,必須要嚴格控制死區時間,也就是絕對不能讓每個橋臂上的電子開關同時導通,這樣容易導致電源短路,電流過大把兩個電子開關燒壞。而專用的驅動IC都有死區控制,比分離元器件電路更安全。

8-電機專用驅動IC
專用IC優勢之二:器件體積更小
分離元器件所搭建的驅動電路,所使用的元器件數目較多,體積較大。而專用驅動IC只需要一顆晶元即可,大大減小了體積、節省了PCB空間,使電路調試更容易。
本文轉自小平頭電子技術社區:https://www.xiaopingtou.cn/article-104206.html

