
摘要 通過前面的基礎學習,本章進入最為激動的機器人自主導航的學習。在前面的學習鋪墊後,終於迎來了最大樂趣的時刻,就是賦予我們的miiboo機器人能自由行走的生命。本章將圍繞機器人SLAM建圖、導航避障、巡航、監控等內容展開。本章內容: 1.在機器人上使用感測器 2.google-cartograph ...
摘要
通過前面的基礎學習,本章進入最為激動的機器人自主導航的學習。在前面的學習鋪墊後,終於迎來了最大樂趣的時刻,就是賦予我們的miiboo機器人能自由行走的生命。本章將圍繞機器人SLAM建圖、導航避障、巡航、監控等內容展開。本章內容:
2.google-cartographer機器人SLAM建圖
1.在機器人上使用感測器
SLAM建圖需要用到底盤、激光雷達和IMU,所以這裡詳細介紹如何在機器人上使用這些感測器。要使用這些感測器也很簡單,就是在機器人上開啟相應感測器的ROS驅動節點,在設置合適的可配參數就行了。
需要註意的是,底盤、激光雷達、IMU這三個感測器都使用串口與樹莓派通信,為了防止每次開機這三個設備的串口號發生變動,需要將串口號進行綁定與重映射,操作方法在前面已經介紹過了,如果還沒有綁定直接前往前面相關內容參考。
這裡將建立一個叫catkin_ws的ROS工作空間,專門用於存放機器人感測器相關的ROS驅動功能包。關於創建ROS工作空間的操作,請參考前面相應部分內容,這裡就不做講解。
1.1.使用底盤
在機器人上只需要使用miiboo這個驅動包就可以驅動底盤了。將miiboo這個驅動包拷貝到~/catkin_ws/src/中,編譯後就可以使用了。miiboo驅動包文件結構,如圖1。miiboo驅動包中含有兩個ROS功能包miiboo_bringup和miiboo_description,驅動miiboo底盤、底盤PID整定、里程計標定這些功能包含在miiboo_bringup中,miiboo底盤urdf模型包含在miiboo_description中。

(圖1)miiboo驅動包文件結構
底盤控制可配參數:
關於底盤控制可配參數都放在miiboo_bringup/launch/minimal.launch中,如圖2。
參數com_port是底盤控制的串口號,由於前面已經做了綁定,所以直接填入綁定好的名稱/dev/miiboo就行了;
參數speed_ratio是里程計走直線標定值,這個值通過標定得到。
參數wheel_distance是里程計轉角標定值,這個值通過標定得到。
其餘參數一般不需要修改,如有需要可以結合閱讀源碼來瞭解參數含有和做相應修改。
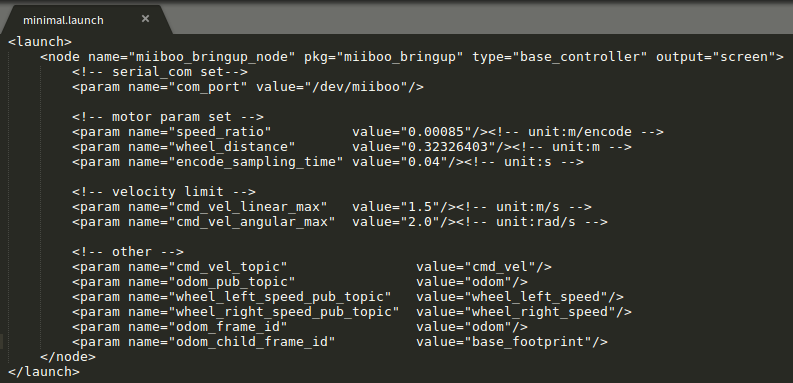
(圖2)底盤控制可配參數
驅動miiboo底盤:
其實很簡單,一條命令啟動miiboo底盤控制。
roslaunch miiboo_bringup minimal.launch
底盤PID整定:
我們的miiboo機器人底盤的stm32控制板中已經內置了整定好的PID參數,如果選用我們提供的控制板和電機,一般情況下是不需要整定PID的。
對於想體驗一下PID參數整定過程或將我們的miiboo機器人底盤的stm32控制板應用到其他地方的朋友,這裡給出了整定PID的整個操作過程和思路,方便大家學習和更深層次的研究。這裡主要講解PID整定的操作,關於原理性的東西可以參考前面相關內容進行瞭解。
由於底盤PID整定是非必須的功能,所以沒有對底盤PID整定的串口(DEBUG-uart1)做綁定,需要先手動插入該串口到樹莓派3,然後手動查看該串口的設備號,並修改該設備號的可讀寫許可權。然後將該設備號填入miiboo_bringup/launch/pid_set.launch中的com_port參數中。然後,需要啟動底盤控制節點、底盤調試節點、鍵盤控制節點。鍵盤控制節點teleop_twist_keyboard需要通過apt-get命令來安裝,rqt_plot是ROS提供的繪圖工具。
#打開終端,啟動底盤控制節點 roslaunch miiboo_bringup minimal.launch #再打開一個終端,啟動底盤調試節點,按提示輸入命令 roslaunch miiboo_bringup pid_set.launch #安裝鍵盤控制工具 sudo apt-get install ros-kinetic-teleop-twist-keyboard #再打開一個終端,啟動鍵盤控制節點, source ~/.bashrc rosrun teleop_twist_keyboard teleop_twist_keyboard.py #再打開一個終端,用rqt_plot對底盤速度曲線進行繪製,指定曲線數據來源的topic rosrun rqt_plot rqt_plot
ROS提供的繪圖工具rqt_plot用法很簡單,在rqt_plot界面中,在Topic欄輸入曲線數據來源,我們這裡為左、右輪速度,然後點擊旁邊的“+”將曲線加入繪製界面,人如圖3。
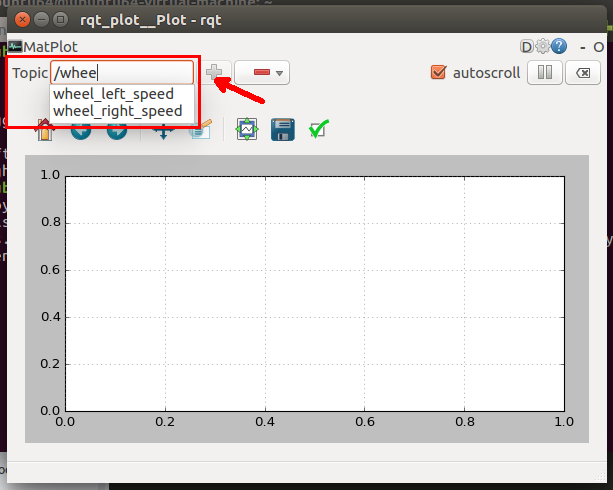
(圖3)用rqt_plot顯示速度曲線
然後,通過在啟動teleop_twist_keyboard節點的終端通過I/</J/L四個按鍵來控制底盤前進/後退/左轉/右轉控制,並觀察速度曲線的變化,根據PID整定規則對PID參數進行整定,在啟動 pid_set.launch的終端下按相應提示輸入PID參數實現對整定參數的編輯。直到得到一個比較好的速度曲線,就可以結束整定過程了。實時速度曲線顯示,如圖4。

(圖4)實時速度曲線顯示
里程計標定:
機器人底盤運行的精度是衡量底盤的重要指標。底盤精度受里程計的走直線誤差和轉角誤差影響。因此,需要對里程計的走直線和轉角進行標定,儘量減小誤差。miiboo機器人底盤的ROS驅動中已經寫好了相應的標定程式,跟里程計標定有關的文件主要有:
.../miiboo_bringup/launch/check_linear.launch為里程計走直線標定啟動文件
.../miiboo_bringup/launch/check_angular.launch為里程計轉角標定啟動文件
.../miiboo_bringup/launch/minimal.launch為設置標定參數及底盤控制啟動文件
下麵是標定步驟過程。
由於標定過程在前面已經講解過了,請直接前往相應內容參考。
miiboo底盤urdf模型:
urdf模型描述了機器人底盤的形狀、感測器之間的安裝關係、各個感測器在tf tree中的關係。其實,miiboo底盤urdf模型的主要作用是提供各個感測器在tf tree中的關係,這些關係將在SLAM和導航演算法中被使用。

(圖5)miiboo機器人底盤中各個感測器tf關係
圖5是miiboo機器人底盤中各個感測器tf關係,base_footprint是底盤的運動中心,base_laser_link是激光雷達的中心,imu_link為IMU模塊的中心。以base_footprint為原點,建立機器人底盤的坐標系,坐標係為標準右手系,即底盤正前方為x軸、正左方為y軸、正上方為z軸、以x軸起始逆時針方向為theta軸。以base_footprint為父坐標系,建立base_footprint->base_laser_link關係,建立base_footprint->imu_link關係,就實現了各個感測器tf關係的構建,構建的具體實現在miiboo_description/urdf/miiboo.urdf中完成。如圖6,為miiboo.urdf的具體內容。
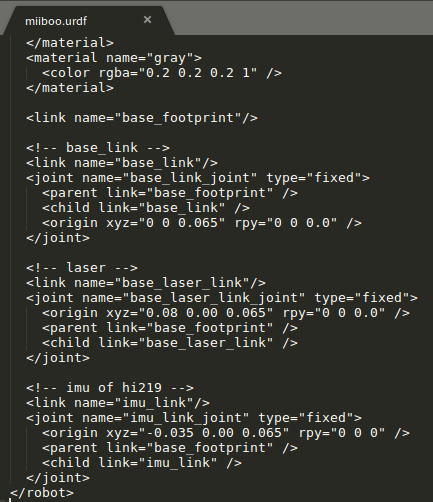
(圖6)miiboo底盤urdf模型描述文件
要使用這個urdf模型就很簡單了,直接一句命令啟動。
roslaunch miiboo_description miiboo_description.launch
1.2.使用激光雷達
在機器人上只需要使用ydlidar這個驅動包就可以驅動ydlidar-x4雷達了。將ydlidar這個驅動包拷貝到~/catkin_ws/src/中,編譯後就可以使用了。ydlidar驅動包文件結構,如圖7。ydlidar驅動包中的其他文件我們不需要關心,這些都是由雷達廠商提供的標準驅動,只需要設置我們自己建立的ydlidar/launch/my_x4.launch文件,這個用於啟動雷達。
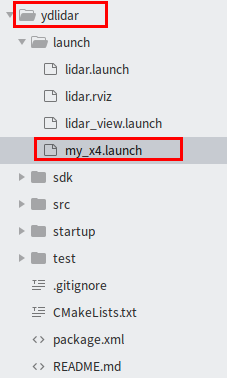
(圖7)ydlidar驅動包文件結構
激光雷達數據可配參數:
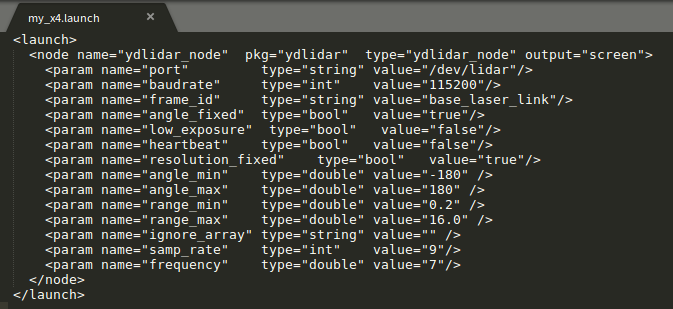
關於激光雷達數據可配參數都放在ydlidar/launch/my_x4.launch中,如圖8。
參數port是激光雷達的串口號,由於前面已經做了綁定,所以直接填入綁定好的名稱/dev/lidar就行了;
參數range_min和range_max是設置激光雷達數據的有效值區間。
其餘參數一般不需要修改,如有需要可以結合閱讀源碼來瞭解參數含有和做相應修改。
(圖8)激光雷達數據可配參數
驅動ydlidar-x4激光雷達:
其實很簡單,一條命令啟動ydlidar-x4激光雷達。
roslaunch ydlidar my_x4.launch
激光雷達數據格式:
激光雷達採用右手坐標系,雷達正前方為x軸、正左方為y軸、正上方為z軸、以x軸起始逆時針方向為theta軸。激光雷達的掃描數據以極坐標的形式表示,雷達正前方是極坐標0度方向、雷達正左方是極坐標90度方向,紅色點為掃描到的數據點,如圖9所示。
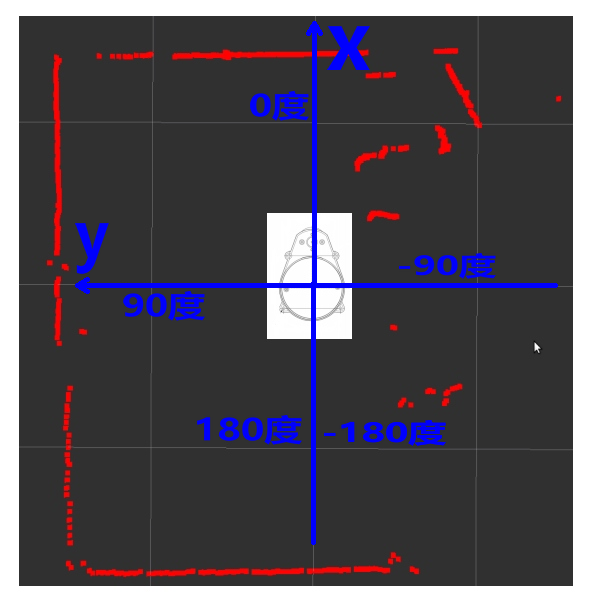
(圖9)激光雷達數據格式
激光雷達的數據在ROS中是以sensor_msgs/LaserScan消息類型進行表示,如圖10,angle_increment表示激光數據點的極坐標遞增角度,ranges數組存放實際的極坐標點距離值。
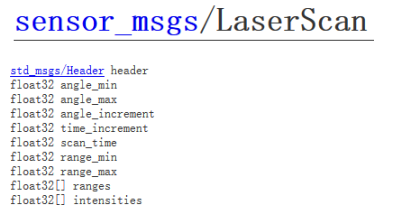
(圖10)激光雷達數據sensor_msgs/LaserScan消息類型
1.3.使用IMU
在機器人上只需要使用miiboo_imu這個驅動包就可以驅動mpu9250模塊了。將miiboo_imu這個驅動包拷貝到~/catkin_ws/src/中,編譯後就可以使用了。miiboo_imu驅動包文件結構,如圖11。ydlidar驅動包中的其他文件我們不需要關心,只需要設置ydlidar/launch/my_x4.launch文件,這個用於啟動IMU。
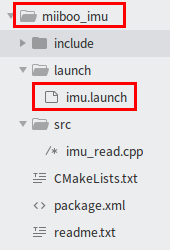
(圖11)miiboo_imu驅動包文件結構
IMU數據可配參數:
關於IMU數據可配參數都放在miiboo_imu/launch/imu.launch中,如圖12。
參數come_port是IMU的串口號,由於前面已經做了綁定,所以直接填入綁定好的名稱/dev/imu就行了;
其餘參數一般不需要修改,如有需要可以結合閱讀源碼來瞭解參數含有和做相應修改。

(圖12)IMU數據可配參數
驅動IMU模塊:
其實很簡單,一條命令啟動IMU模塊。
roslaunch miiboo_imu imu.launch
IMU數據格式:
IMU模塊採用右手坐標系,IMU模塊正前方為x軸、正左方為y軸、正上方為z軸。IMU模塊提供3軸加速度、3軸角速度、3軸磁力計、經數據融合後用歐拉角表示的姿態。
IMU數據在ROS中是以sensor_msgs/Imu消息類型進行表示,如圖13。
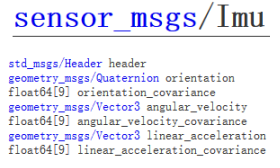
(圖13)IMU數據sensor_msgs/Imu消息類型
1.4.使用攝像頭
miiboo機器人上使用的是USB攝像頭,用ROS驅動USB攝像頭可以採用以下3中方法。
方法1:
使用usb_cam這個ROS包直接驅動
方法2:
使用gscam這個ROS包直接驅動
方法3:
自製OpenCV,cv_bridge,image_transport驅動ROS包
為了方便起見,我採用的是方法1,直接安裝usb_cam這個ROS包直接驅動。
usb_cam攝像頭驅動安裝:
將usb_cam下載到~/catkin_ws/src/中,直接編譯就行了。
cd ~/catkin_ws/src/ git clone https://github.com/ros-drivers/usb_cam.git rosdep install usb_cam cd ~/catkin_ws/ catkin_make
攝像頭數據可配參數:
關於攝像頭數據可配參數都放在usb_cam/launch/usb_cam.launch中,如圖14。
參數video_device是攝像頭的設備號,由於直插了一個USB攝像頭,所以直接填入名稱/dev/video0就行了;
其餘參數一般不需要修改,如有需要可以結合閱讀源碼來瞭解參數含有和做相應修改。
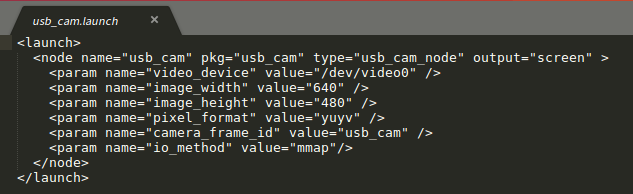
(圖14)攝像頭數據可配參數
驅動USB攝像頭:
其實很簡單,一條命令啟動USB攝像頭。
roslaunch usb_cam usb_cam.launch
攝像頭遠程顯示:
攝像頭數據遠程顯示的方法有兩種,方法一是在PC端rviz中訂閱攝像頭髮布的圖像topic,方法二是用Android手機上miiboo機器人APP直接顯示。
先說方法一,在PC端打開rviz,在rviz中添加需要顯示的Topic,這樣就可以看到圖像了。如圖15和16。

(圖15)在rviz中添加需要顯示的圖像Topic
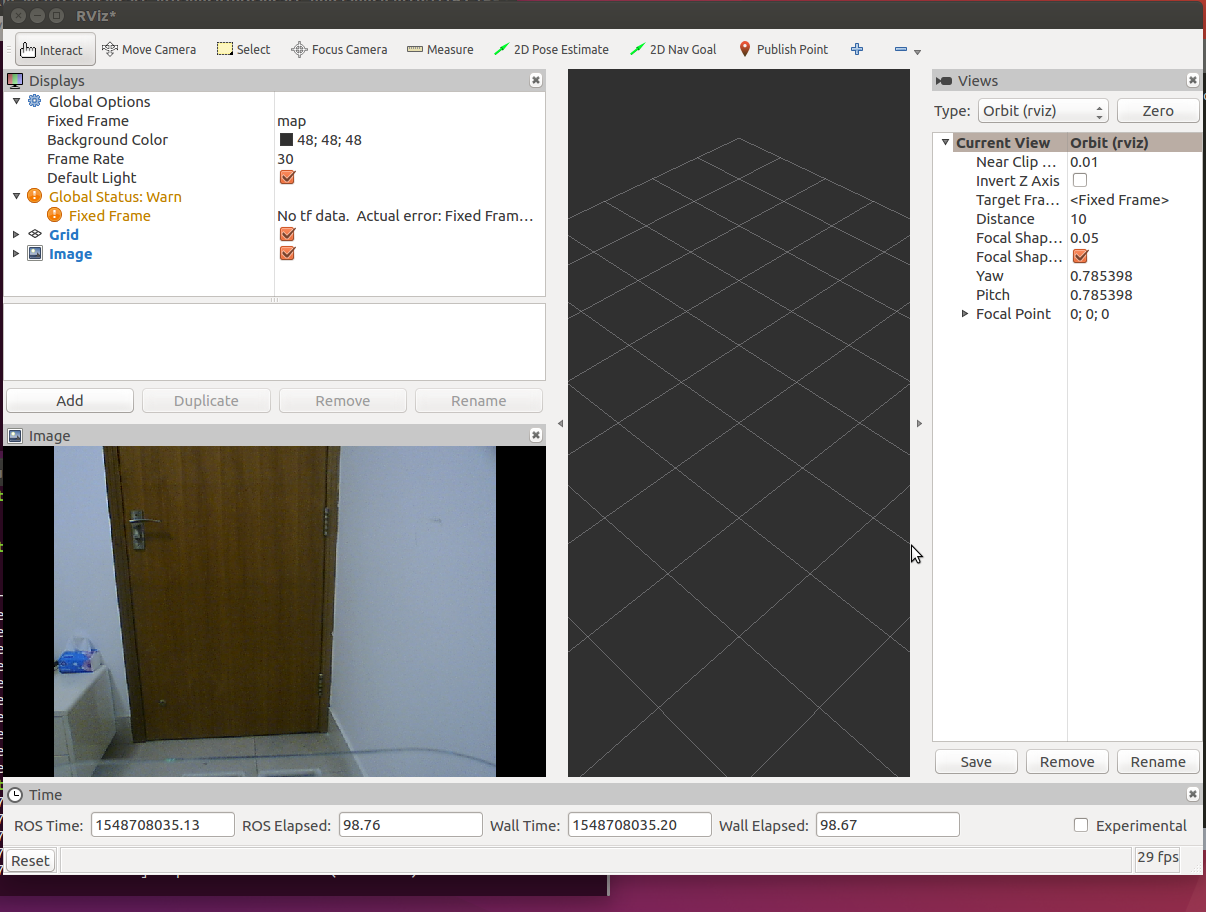
(圖16)在rviz中顯示圖像Topic
方法二,就很簡單了,只要Android手機上miiboo機器人APP連接到機器人端成功後,就能自動顯示圖像了。如圖17。

(圖17)在Android手機的miiboo機器人APP中顯示圖像Topic
1.5.區域網內廣播機器人自己的IP
這個很簡單,由broadcast_ip這個功能包實現,我已經寫好放入~/catkin_ws/src/並編譯了。只需要一句命令啟動就行了。
roslaunch broadcast_ip broadcast_udp.launch
後記
如果大家對博文的相關類容感興趣,或有什麼技術疑問,歡迎加入下麵的《SLAM+語音機器人DIY》QQ技術交流群,一起討論學習^_^


