
基於Xilinx zynq-7000系列FPGA,移植Linux操作系統的詳細教程,包含u-boot,內核,文件系統等具體編譯過程,以及設備樹,fsbl的使用方法 ...
Xilinx zynq-7000系列FPGA移植Linux操作系統詳細教程
一:前言
最近手上壓了一塊米聯客的Miz7035,一塊xilinx zynq-7000系列的開發板,想著正好學習一下linux在ARM9上的移植,網上基本都是ZC702、zed的教程,這對於買了非標準板的人來說就不太友好,很多文件都不知道是怎麼生成的。本著學習加分享的心態,把這兩天移植linux的過程寫下來,儘可能詳細。驅動和系統移植不是我的專長,很多地方我也是知其然不知其所以然,寫得不對的地方歡迎指正。
二:前期準備
1、一臺安裝好linux系統的主機,我安裝的是centos7.2.
2、一塊zynq-7000系列的FPGA開發板,我手上的是米聯客miz7035,其他zynq系列一樣通用。
3、vivado開發環境,我安裝的2018.2版本
4、u-boot,device-tree,kernel下載。地址分別是:https://github.com/Xilinx/u-boot-xlnx (u-boot)、https://github.com/Xilinx/linux-xlnx(kernel)、https://github.com/Xilinx/device-tree-xlnx(device-tree)。
5、根文件系統,這裡我裂牆推薦Debian,Debian這個Linux系統,底層非常穩定,內核和記憶體的占用都非常小,下載地址:https://pan.baidu.com/s/1eHmjGd-dTtgnITjG2D3CYA
三:操作步驟
1.設置交叉編譯環境
因為最終運行在arm9上,所以uboot、內核,文件系統編譯都需要用arm-linux交叉編譯工具,zynq2000使用的是arm-linux-gnueabihf,交叉編譯工具可以從網上單獨下載,也可直接使用vivado自帶的交叉編譯工具。使用方法也很簡單
source /opt/Xilinx/SDK/2018.2/settings64.sh
或者
gedit /opt/Xilinx/SDK/2018.2/.settings64-SDK_Core_Tools.sh
將該文件中的內容全部複製到bashrc,更新環境變數,這樣在新的終端中打開,環境變數也不會消失。
2.u-boot編譯
進入u-boot文件夾,
make distclean //清除配置文件和編譯中間結果 make CROSS_COMPILE=arm-linux-gnueabihf- zynq_mz7x_defconfig //重新配置,生成makefile,具體板子不一樣,在U-Boot/configs文件夾下 make CROSS_COMPILE=arm-linux-gnueabihf- tools //編譯開發所需要的工具 make CROSS_COMPILE=arm-linux-gnueabihf- //編譯,完成後生成一個elf文件u-boot,uboot.bin,u-boot.srec等文件
最後把編譯生成的u-boot尾碼改成.elf,連同u-boot.img和spl/boot.bin,一共三個文件拷貝出來。
3.kernel內核編譯
export PATH=${YOUR_UBOOT_DIR}/tools:$PATH //編譯內核如果要生成uImage,則需要用到mkimage工具,該工具在u-boot/tools下有提供
make distclean //清除配置文件和編譯中間結果 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- xilinx_mz7x_defconfig //重新配置,生成makefile make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- prepare scripts //編譯開發所需要的工具 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- UIMAGE_LOADADDR=0x8000 uImage //編譯內核,且生成uImage
最後把{KERNEL_DIR}/arch/arm/boot/zImage,{KERNEL_DIR}/arch/arm/boot/uImage拷貝出來。
# zImage - compressed kernel image
# uImage - zImage plus U-Boot header
uImage是在zImage之前加上一個長度為0x40的“頭”,說明這個映像文件的類型、載入位置、生成時間、大小等信息。換句話說,如果直接從uImage的0x40位置開始執行,zImage和uImage沒有任何區別。
4、設備樹編譯
經過內核編譯,在kernel文件夾下script/dtc中有編譯好的設備樹編譯工具
cd kernel/scripts/dtc ./dtc -I dts -O dtb -o devicetree.dtb /FPGA工程目錄/SDK目錄/device_tree_bsp_0/system-top.dts //dts為sdx工程中生成,編譯後在當前目錄下生成一個名為devicetree.dtb)。
5. 編譯並安裝內核模塊,更新文件系統
本文提供的rootfs是已經編譯好的,如果想要重新編譯或者更新文件系統,可以下載後解壓,然後執行以下步驟
cd your_downlood_kernel_dir //打開編譯好的內核文件夾 make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- modules //編譯內核模塊, make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- modules_install INSTALL_MOD_PATH=../rootfs // 在上一步打開的終端中,重新安裝內核模塊,安裝路徑為解壓出來的rootfs路徑 tar -cvzf rootfs.tar.gz rootfs。//將安裝好內核模塊的根文件系統重新壓縮
6.生成啟動鏡像文件
製作啟動鏡像需要用到三個文件:fsbl.elf、system.bit和第二步生成的u-boot.elf。
打開SDK工具,生成fsbl的方法網上很多,自己查閱,不贅述了,這裡只介紹如何製作boot image
在fsbl工程目錄上右鍵選擇Create Boot Image

加入u-boot.elf的路徑,然後Create Image,就會在指定的輸出路徑上生成BOOT.bin
7.設置UBOOT環境變數
新建一個uEnv.txt,輸入內容:
optargs=console=tty0 consoleblank=0 vt.global_cursor_default=0
這部分不是很懂,有清楚的請留言。
8.製作SD卡
找一張SD卡,通過系統自帶的磁碟工具,首先格式化。然後創建兩個分區,一個100M FAT格式,命名為UBOOT,剩餘的8G ext4格式,命名為rootfs。如圖所示:

將步驟6、7、4、3生成的BOOT.bin、uEnv.txt、devicetree.dtb、uImage拷貝到UBOOT分區下
將步驟5生成的rootfs.tar.gz解壓到rootfs分區下。
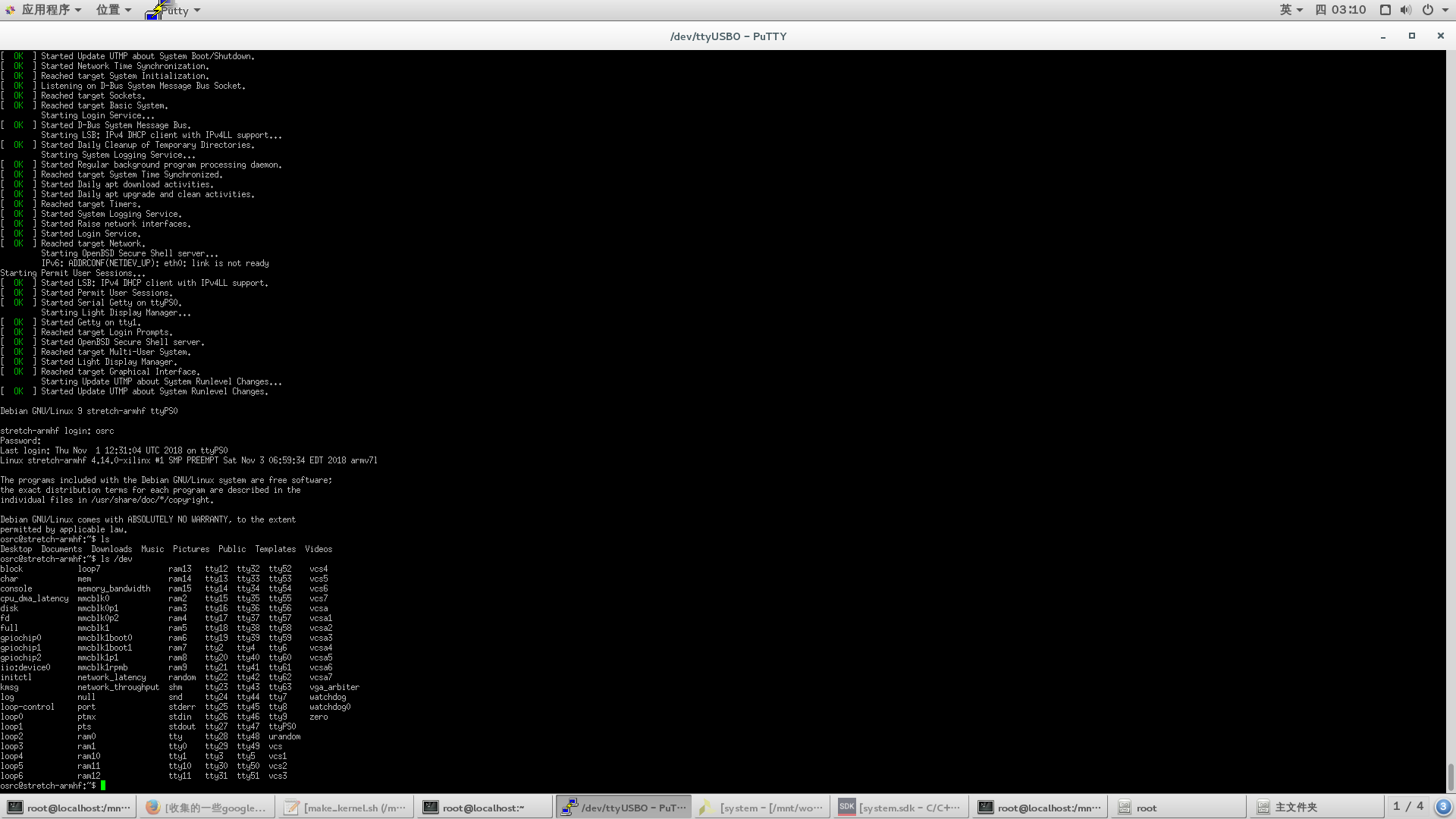
四:實驗結果


五、結束語
至此,debian在zynq上的移植全部結束,之後,我將分享如何在linux基礎上開發字元驅動,以及如何運行QT程式,並通過一個攝像頭採集的例子作為具體應用。


