
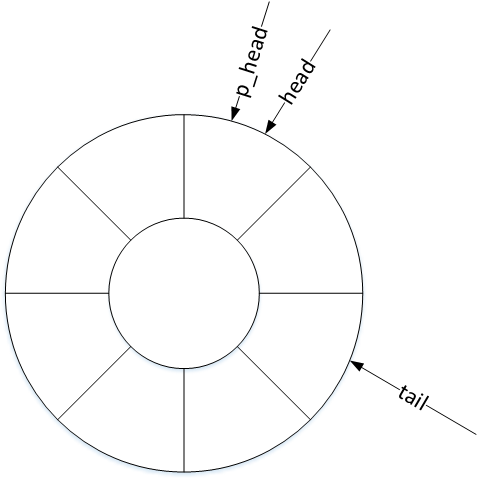
在事件處理層(evdev.c)中結構體evdev_client定義了一個環形緩衝區(circular buffer),其原理是用數組的方式實現了一個先進先出的迴圈隊列(circular queue),用以緩存內核驅動上報給用戶層的input_event事件。 evdev_client對象維護了三個偏 ...
在事件處理層(evdev.c)中結構體evdev_client定義了一個環形緩衝區(circular buffer),其原理是用數組的方式實現了一個先進先出的迴圈隊列(circular queue),用以緩存內核驅動上報給用戶層的input_event事件。
struct evdev_client {
unsigned int head; // 頭指針
unsigned int tail; // 尾指針
unsigned int packet_head; // 包指針
spinlock_t buffer_lock;
struct fasync_struct *fasync;
struct evdev *evdev;
struct list_head node;
unsigned int clk_type;
bool revoked;
unsigned long *evmasks[EV_CNT];
unsigned int bufsize; // 迴圈隊列大小
struct input_event buffer[]; // 迴圈隊列數組
};evdev_client對象維護了三個偏移量:head、tail以及packet_head。head、tail作為迴圈隊列的頭尾指針記錄入口與出口偏移,那麼包指針packet_head有什麼作用呢?
packet_head
內核驅動處理一次輸入,可能上報一到多個input_event事件,為表示處理完成,會在上報這些input_event事件後再上報一次同步事件。頭指針head以input_event事件為單位,記錄緩衝區的入口偏移量,而包指針packet_head則以“數據包”(一到多個input_event事件)為單位,記錄緩衝區的入口偏移量。
環形緩衝區的工作機制
迴圈隊列入隊演算法:
head++; head &= bufsize - 1;迴圈隊列出隊演算法:
tail++; tail &= bufsize - 1;迴圈隊列已滿條件:
head == tail迴圈隊列為空條件:
packet_head == tail“求餘”和“求與”
為解決頭尾指針的上溢和下溢現象,使隊列的元素空間可重覆使用,一般迴圈隊列的出入隊演算法都採用“求餘”操作:
head = (head + 1) % bufsize; // 入隊
tail = (tail + 1) % bufsize; // 出隊
為避免計算代價高昂的“求餘”操作,使內核運作更高效,input子系統的環形緩衝區採用了“求與”演算法,這要求bufsize必須為2的冪,在後文中可以看到bufsize的值實際上是為64或者8的n倍,符合“求與”運算的要求。
環形緩衝區的構造以及初始化
用戶層通過open()函數打開input設備節點時,調用過程如下:
open() -> sys_open() -> evdev_open()
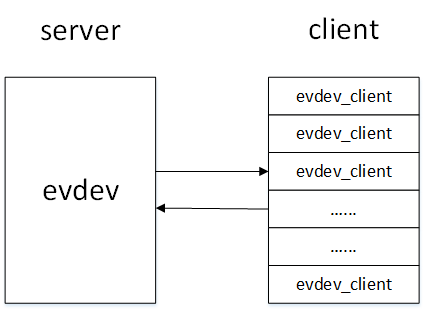
在evdev_open()函數中完成了對evdev_client對象的構造以及初始化,每一個打開input設備節點的用戶都在內核中維護了一個evdev_client對象,這些evdev_client對象通過evdev_attach_client()函數註冊在evdev1對象的內核鏈表上。
接下來我們具體分析evdev_open()函數:
static int evdev_open(struct inode *inode, struct file *file)
{
struct evdev *evdev = container_of(inode->i_cdev, struct evdev, cdev);
// 1.計算環形緩衝區大小bufsize以及evdev_client對象大小size
unsigned int bufsize = evdev_compute_buffer_size(evdev->handle.dev);
unsigned int size = sizeof(struct evdev_client) +
bufsize * sizeof(struct input_event);
struct evdev_client *client;
int error;
// 2. 分配內核空間
client = kzalloc(size, GFP_KERNEL | __GFP_NOWARN);
if (!client)
client = vzalloc(size);
if (!client)
return -ENOMEM;
client->bufsize = bufsize;
spin_lock_init(&client->buffer_lock);
client->evdev = evdev;
// 3. 註冊到內核鏈表
evdev_attach_client(evdev, client);
error = evdev_open_device(evdev);
if (error)
goto err_free_client;
file->private_data = client;
nonseekable_open(inode, file);
return 0;
err_free_client:
evdev_detach_client(evdev, client);
kvfree(client);
return error;
}在evdev_open()函數中,我們看到了evdev_client對象從構造到註冊到內核鏈表的過程,然而它是在哪裡初始化的呢?其實kzalloc()函數在分配空間的同時就通過__GFP_ZERO標誌做了初始化:
static inline void *kzalloc(size_t size, gfp_t flags)
{
return kmalloc(size, flags | __GFP_ZERO);
}生產者/消費者模型
內核驅動與用戶程式就是典型的生產者/消費者模型,內核驅動產生input_event事件,然後通過input_event()函數寫入環形緩衝區,用戶程式通過read()函數從環形緩衝區中獲取input_event事件。
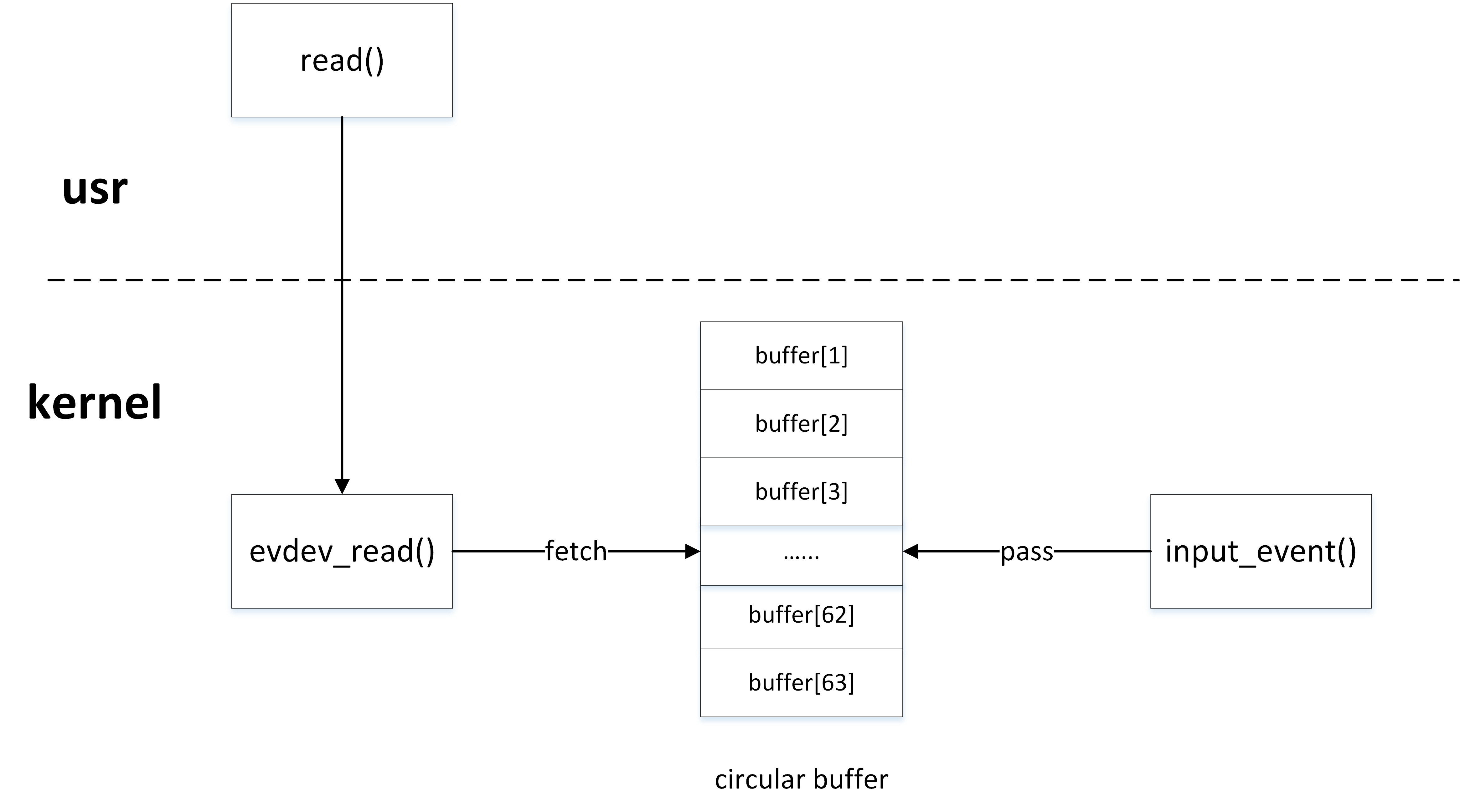
環形緩衝區的生產者
內核驅動作為生產者,通過input_event()上報input_event事件時,最終調用___pass_event()函數將事件寫入環形緩衝區:
static void __pass_event(struct evdev_client *client,
const struct input_event *event)
{
// 將input_event事件存入緩衝區,隊頭head自增指向下一個元素空間
client->buffer[client->head++] = *event;
client->head &= client->bufsize - 1;
// 當隊頭head與隊尾tail相等時,說明緩衝區空間已滿
if (unlikely(client->head == client->tail)) {
/*
* This effectively "drops" all unconsumed events, leaving
* EV_SYN/SYN_DROPPED plus the newest event in the queue.
*/
client->tail = (client->head - 2) & (client->bufsize - 1);
client->buffer[client->tail].time = event->time;
client->buffer[client->tail].type = EV_SYN;
client->buffer[client->tail].code = SYN_DROPPED;
client->buffer[client->tail].value = 0;
client->packet_head = client->tail;
}
// 當遇到EV_SYN/SYN_REPORT同步事件時,packet_head移動到隊頭head位置
if (event->type == EV_SYN && event->code == SYN_REPORT) {
client->packet_head = client->head;
kill_fasync(&client->fasync, SIGIO, POLL_IN);
}
}環形緩衝區的消費者
用戶程式作為消費者,通過read()函數讀取input設備節點時,最終在內核調用evdev_fetch_next_event()函數從環形緩衝區中讀取input_event事件:
static int evdev_fetch_next_event(struct evdev_client *client,
struct input_event *event)
{
int have_event;
spin_lock_irq(&client->buffer_lock);
// 判緩衝區中是否有input_event事件
have_event = client->packet_head != client->tail;
if (have_event) {
// 從緩衝區中讀取一次input_event事件,隊尾tail自增指向下一個元素空間
*event = client->buffer[client->tail++];
client->tail &= client->bufsize - 1;
if (client->use_wake_lock &&
client->packet_head == client->tail)
wake_unlock(&client->wake_lock);
}
spin_unlock_irq(&client->buffer_lock);
return have_event;
}

