
資料 "A literature review of UAV 3D path planning" 上面那個論文把uav的路徑規劃分為以下5類: sampling based algorithms node based algorithms mathematical model based algor ...
資料
A literature review of UAV 3D path planning
上面那個論文把uav的路徑規劃分為以下5類:
- sampling-based algorithms
- node-based algorithms
- mathematical model based algorithms
- Bio-inspired algorithms
- multi-fusion based algorithms
- 完備的(complete)(有解是可以求出來的),主要應用於二維三維的grid,多維的計算量就大了
- 基於採樣的(sampling-based)又稱為概率完備的,(有解不一定能求出來的,可能經過足夠多的採樣可以得到解,是概率上的可能能得到解)
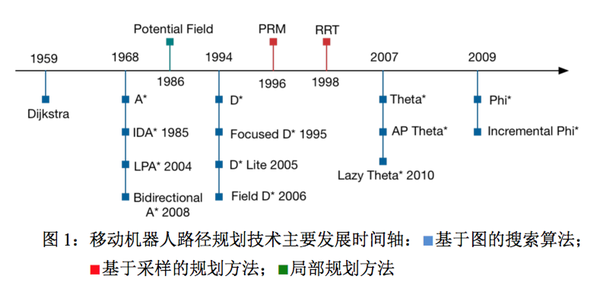
路徑規划算法發展的歷程
公開課
RRT(快速隨機搜索樹)
RRT演算法是RRT演算法的變種演算法,演算法可以收斂到最優解,不僅可以實現二維環境下的路徑規劃,多維度的環境也可以使用RRT演算法,而且由於演算法是均勻採樣,並不會出現局部最小的情況。
RPM 要先構建roadmap,因此可以多次使用的,graph中的node還可以相互連接的
RRT是直接從start node延增出去的,每個node只有一個parent的,
偽代碼
- add start node to tree
- repeat n times
- generate a random configuration x
- if x is a freespace using the `CollisionCheck` function
find y ,the cloest node in the tree to the random configuraion x
if (`Dist(x,y) > delta`) -- check if x too far from y
find a configuration z that is along the path from x to y such that Dist(z,y) <= delta
x = z
if (`LocalPlanner(x,y)`) -- check if you can get from x to y .Add x to the tree with y as patentArtifical potential fields
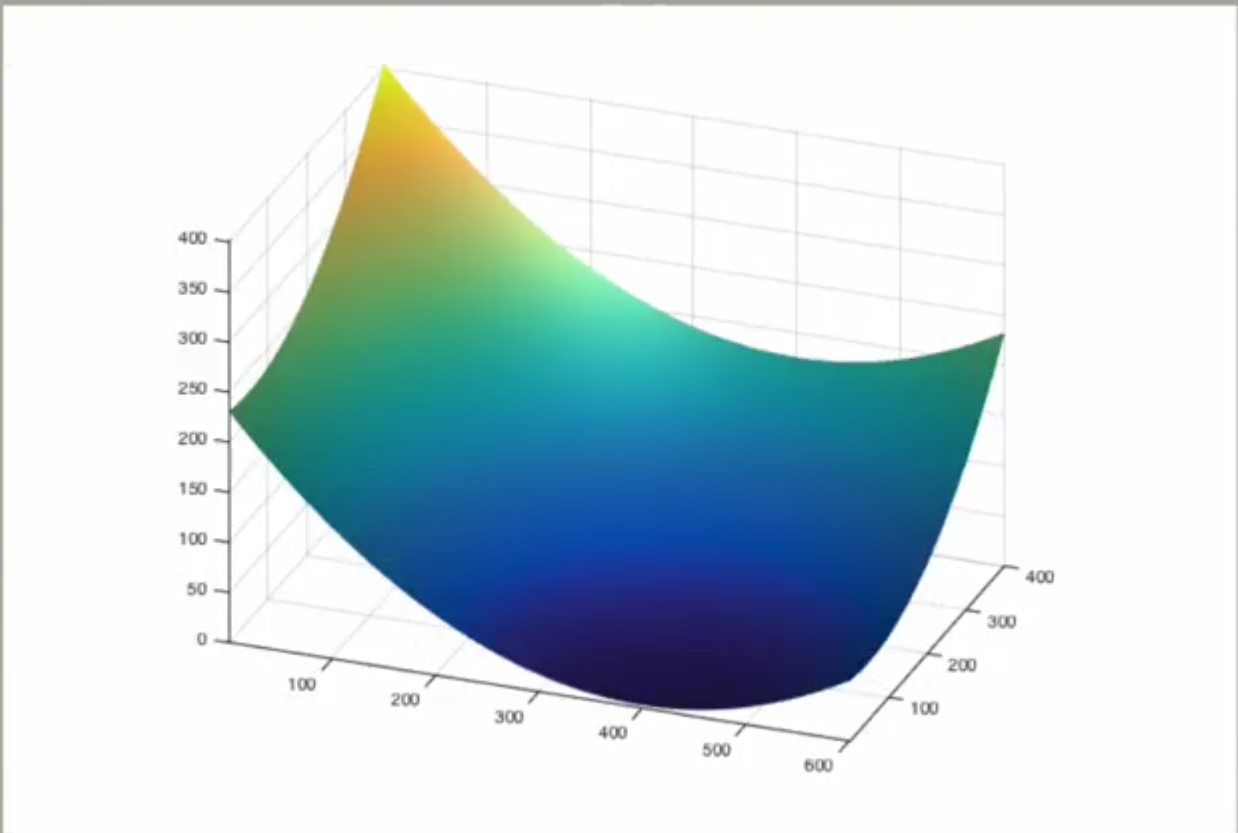
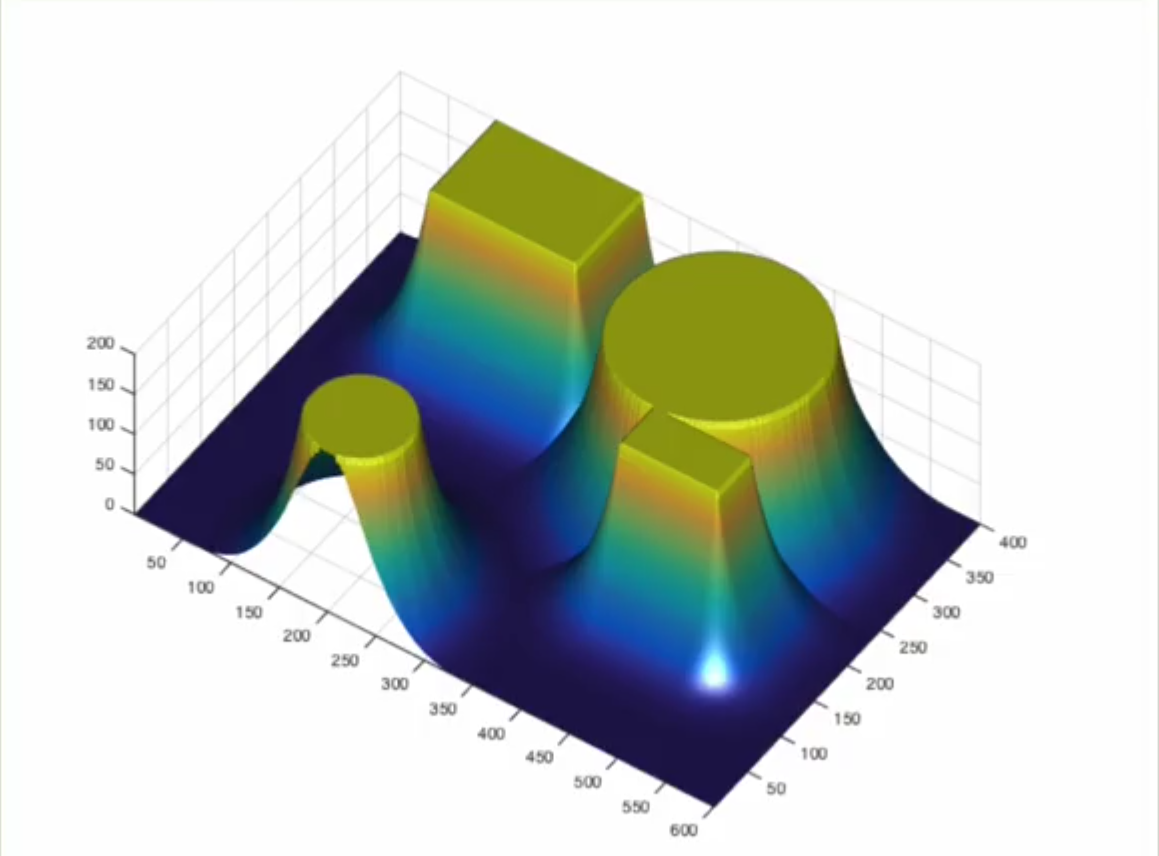
構造一個函數 = an attractive potential field + a repulsive potential field
= 一個離目標點越近能量越低的函數 + 一個離障礙物越遠能量越低的函數
下麵第一張圖是黑色障礙物,第二張圖是attractive potential field ,第三張圖是 repulsive potential field,最後一張是上面兩個的相加得到的最終構造的函數

可能會陷入到local minimum
nbvplanner
ethz 開源的一個路徑規划算法庫
需要的是里程計tf坐標變換和3d點雲數據,計算下個位置的gain,這個gain也考慮了octomap中格子的概率,考慮的是看到還沒有mapped的格子
,儘可能尋找相應多的格子進行路徑規劃,
代碼中的mesh_structure.h,對我們的作用不是很大,主要是用於導入CAD圖紙,不用線上輸入點雲數據,這時候尋找的是看到的surface最多的下一個目標點
tool
工具顯示的第三個維度是概率的大小,可視化,針對的是moveit這個開源工具,沒有試過別的可不可以
TODO
具體的代碼下周會寫,寫完再具體寫一寫內容。


