1. 四旋翼無人機飛行原理:欠驅動系統 通過4個電機的轉速,來控制飛行器X、Y、Z軸的加速度和角速度,實現懸停、垂直升降、俯仰、偏航、滾轉(這裡只對比較陌生的俯仰、偏偏行、滾轉做示意圖說明)。 組成 運動控制 運動控制主要參考:四旋翼無人機飛行原理及控制方法,你瞭解多少? 實物圖 2. 無人機設計思 ...
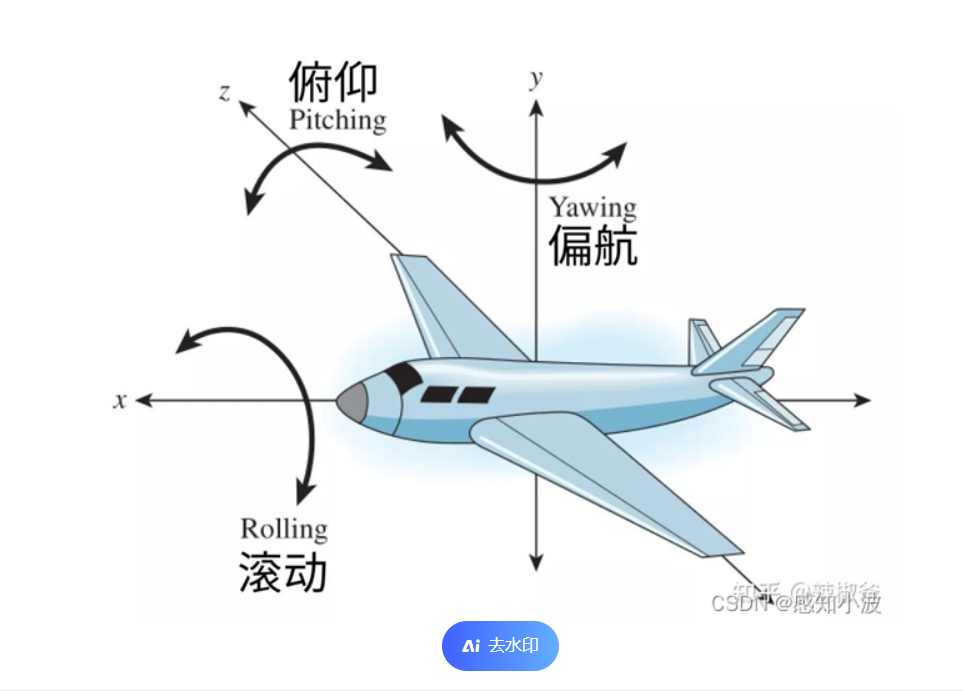
1. 四旋翼無人機飛行原理:欠驅動系統
通過4個電機的轉速,來控制飛行器X、Y、Z軸的加速度和角速度,實現懸停、垂直升降、俯仰、偏航、滾轉(這裡只對比較陌生的俯仰、偏偏行、滾轉做示意圖說明)。

組成
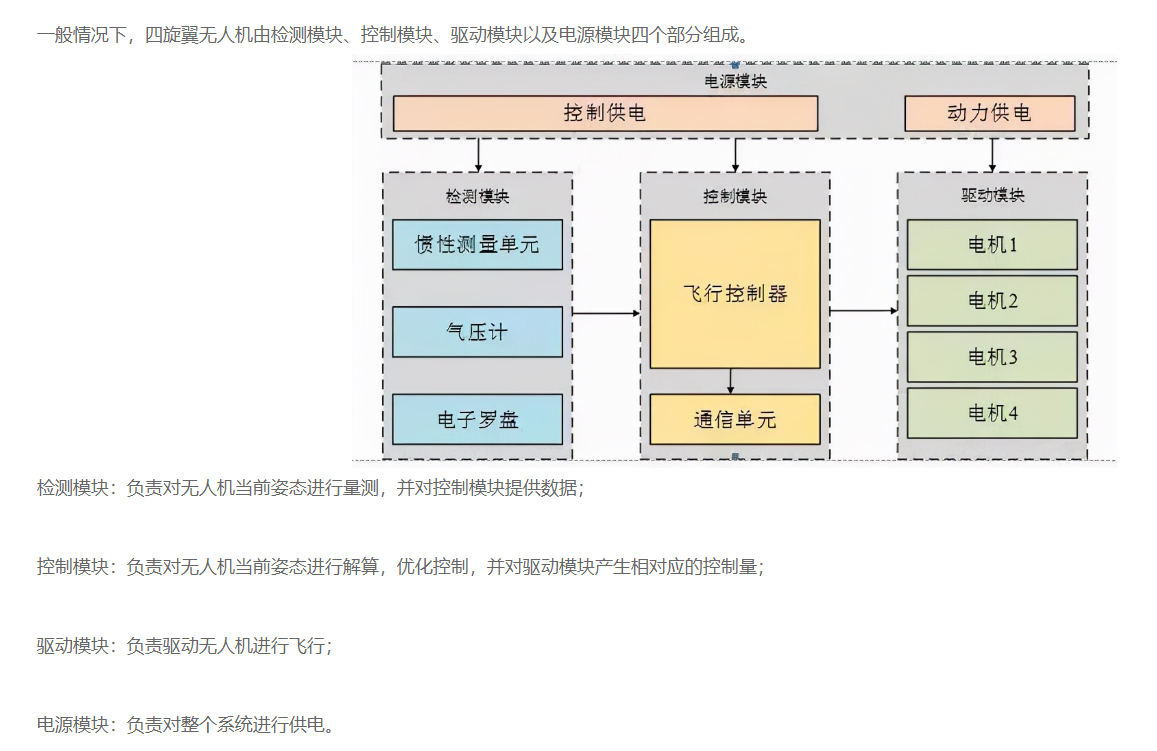
運動控制
運動控制主要參考:四旋翼無人機飛行原理及控制方法,你瞭解多少?
實物圖

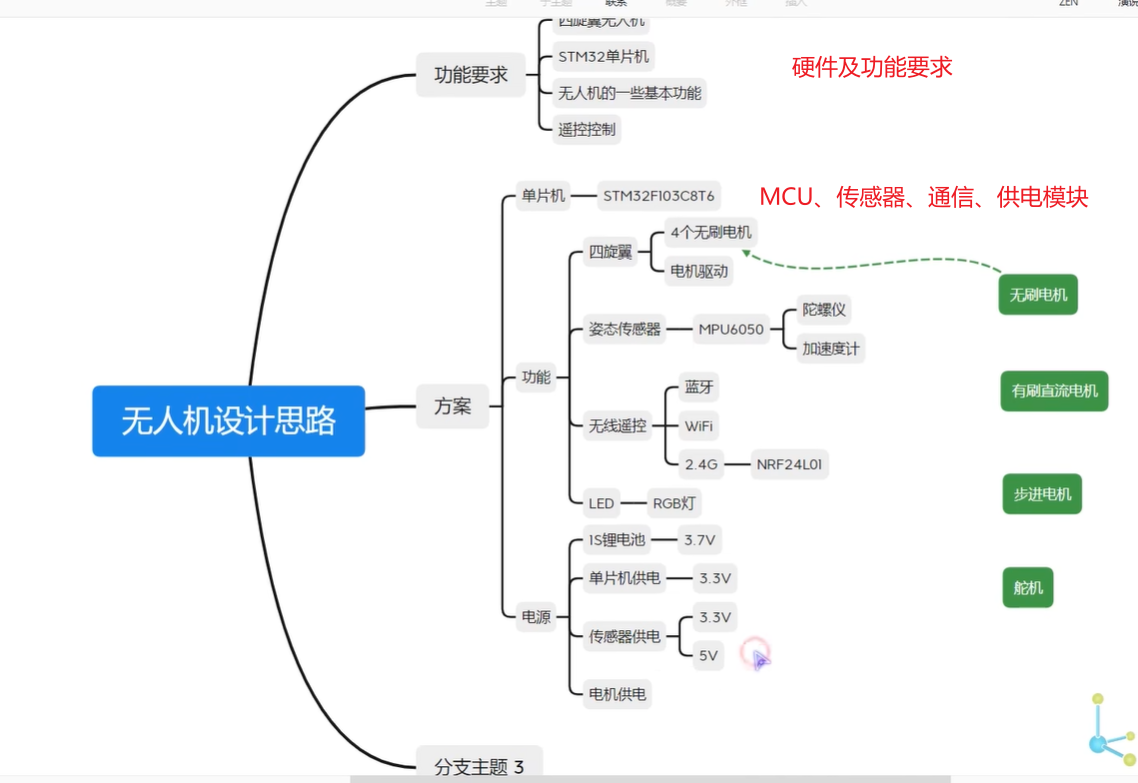
2. 無人機設計思路
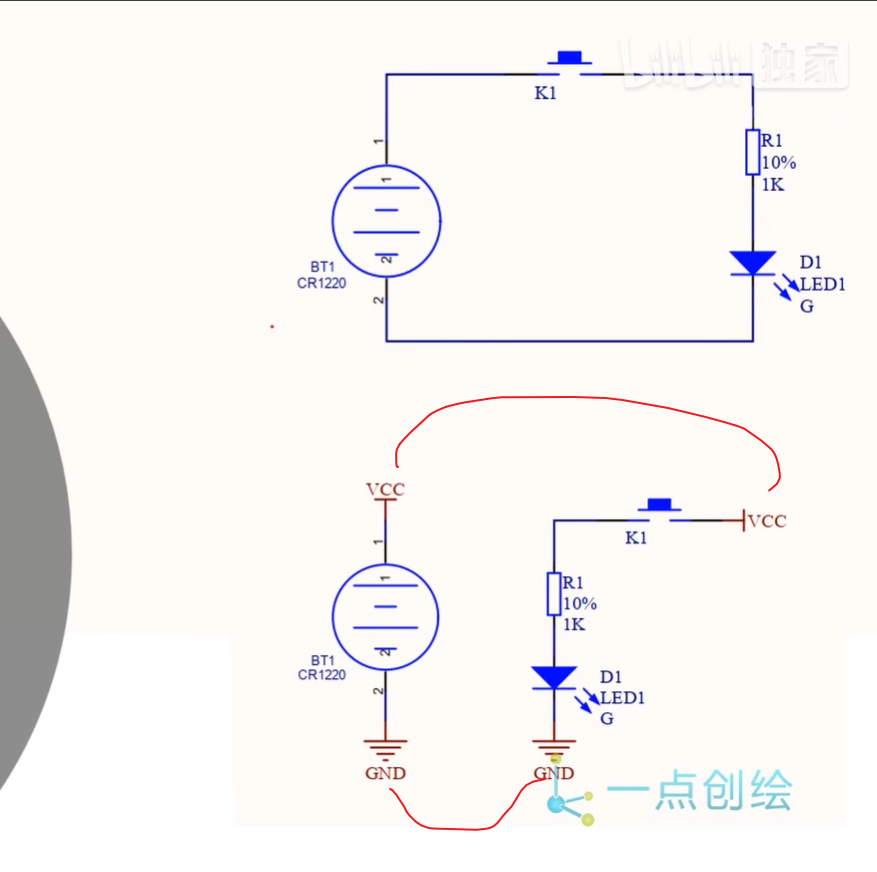
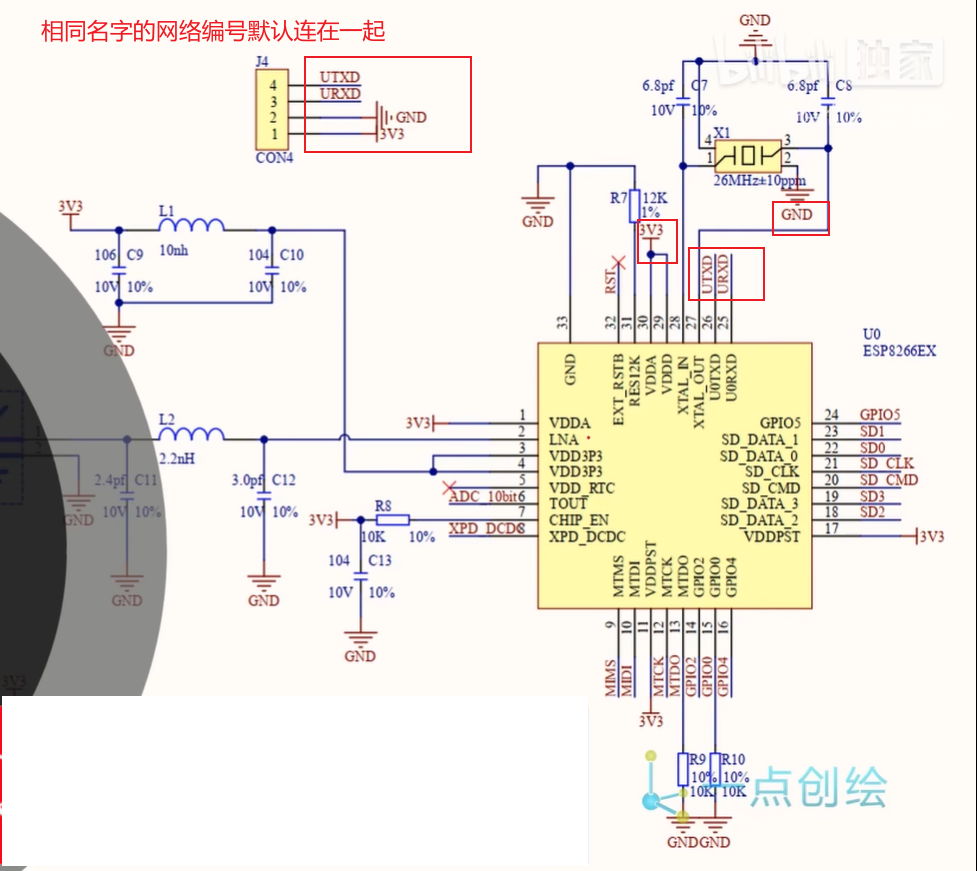
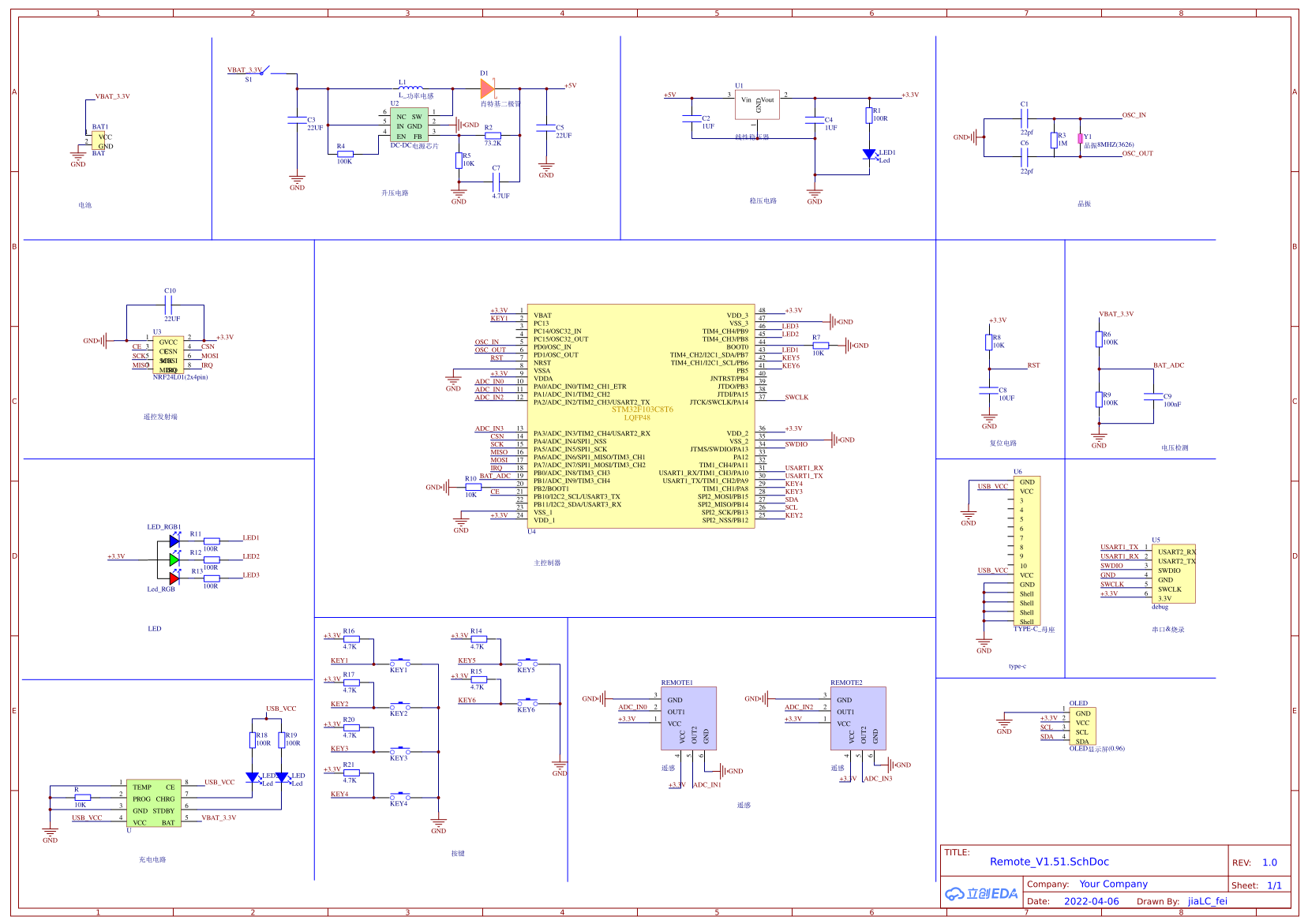
3. 原理圖和電路
註意,電路圖為上圖,而實際設計電路時電路結構複雜,因此通常會用網路編號來來代表不同電路間的連接關係。相同網路編號的端子預設連在一起。
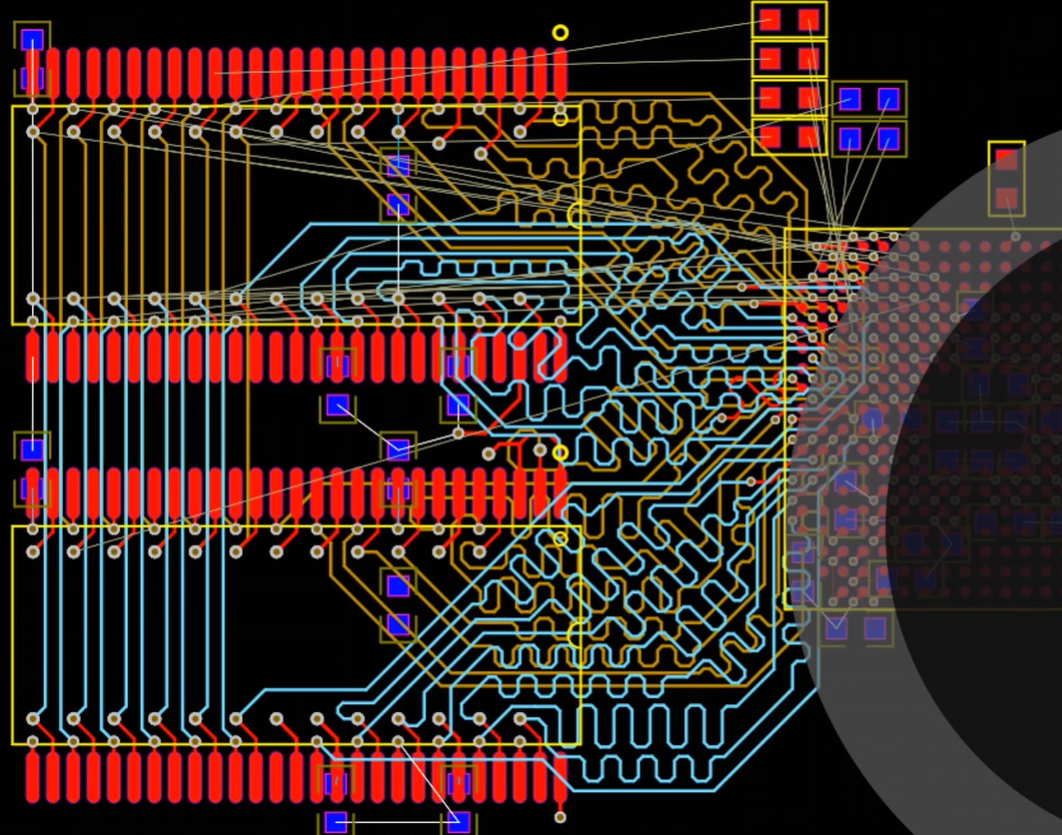
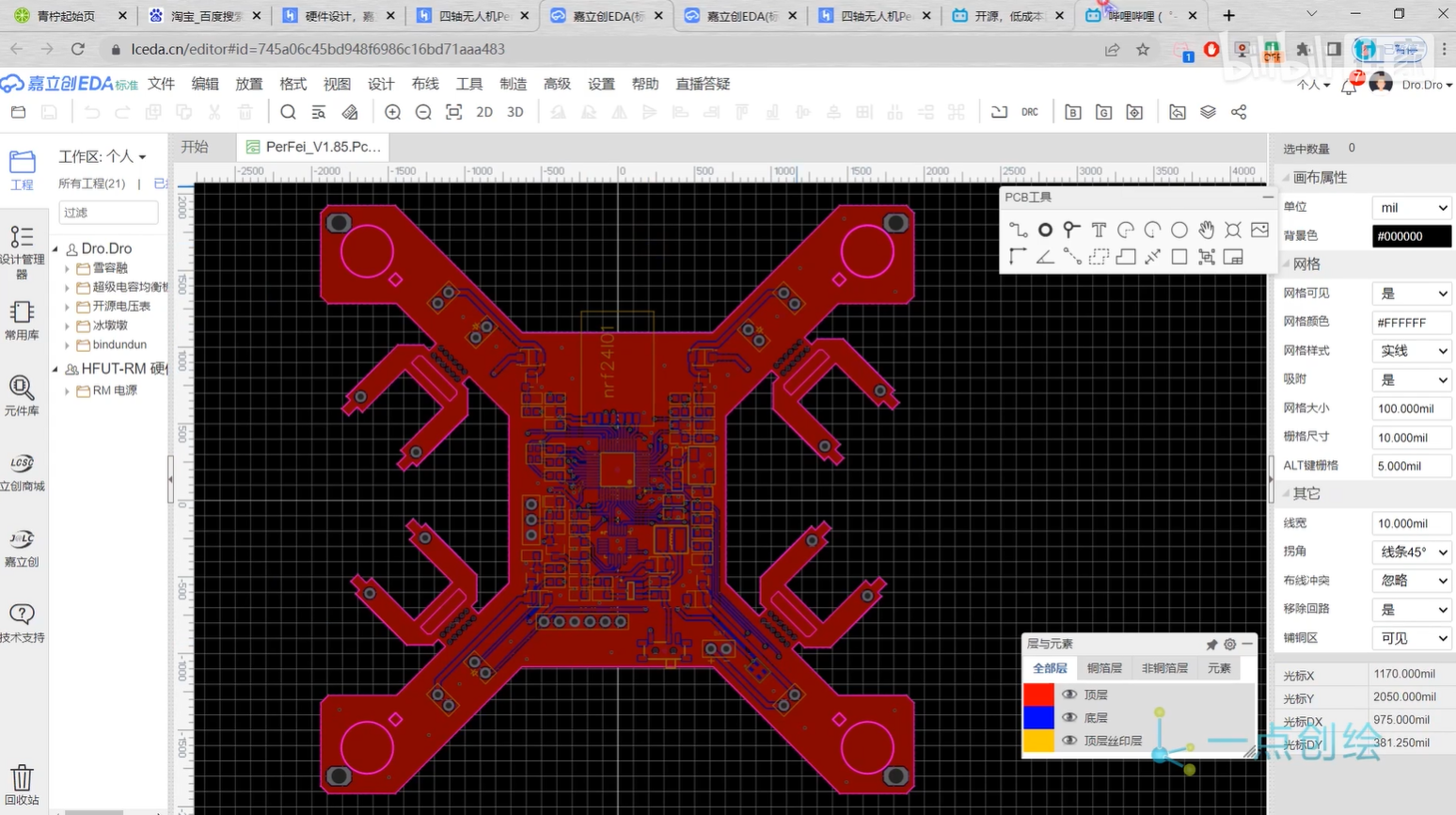
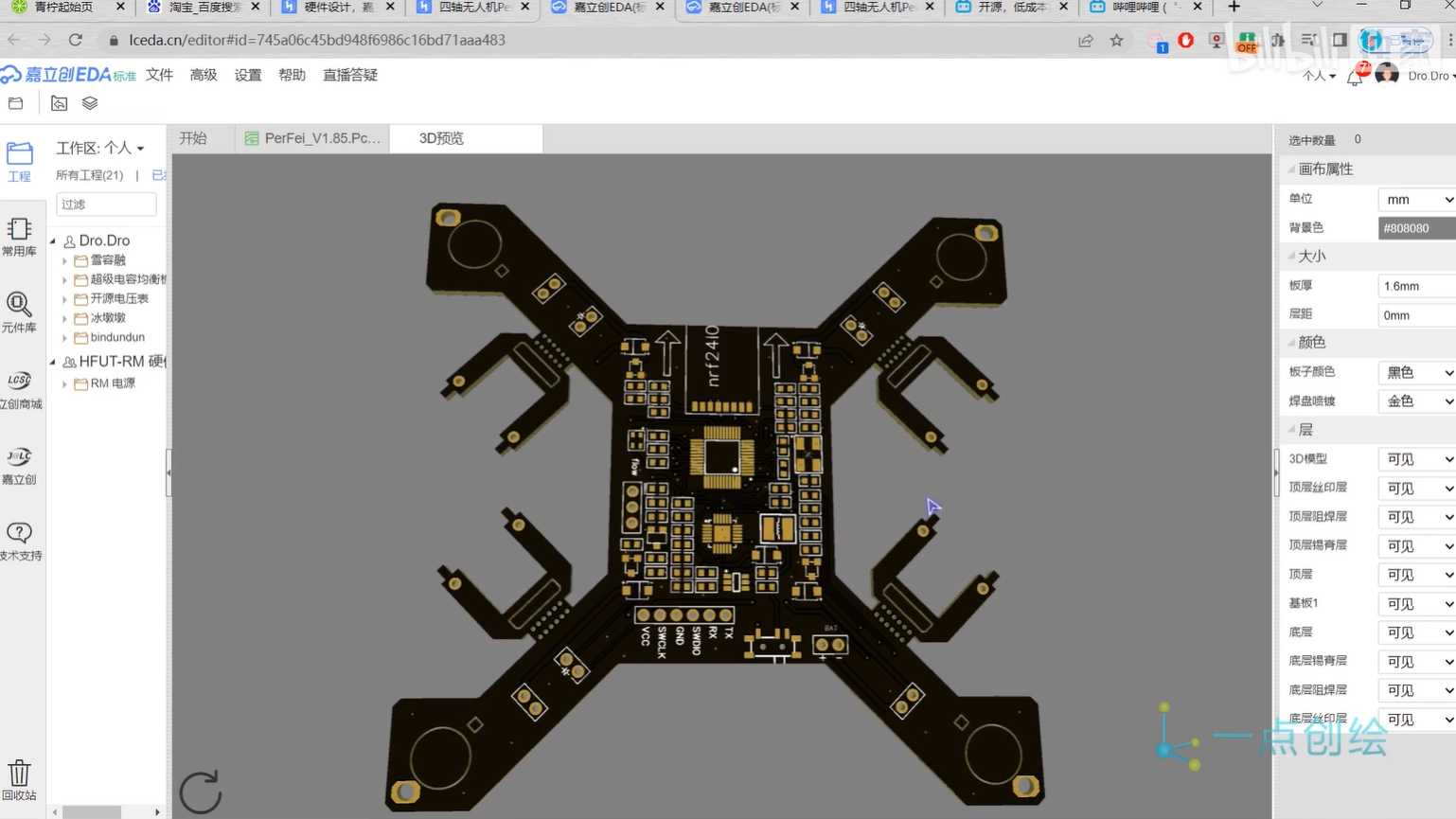
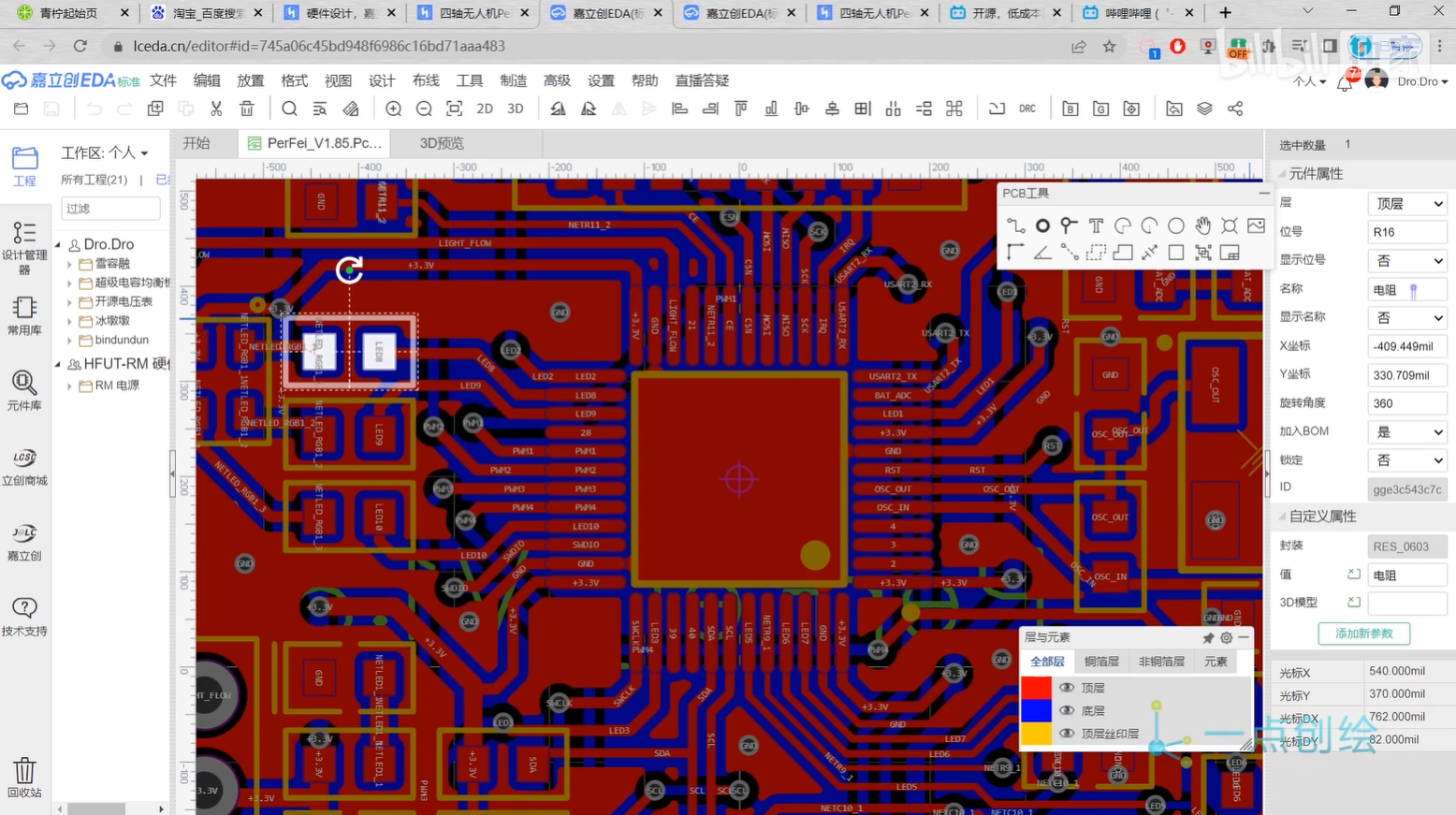
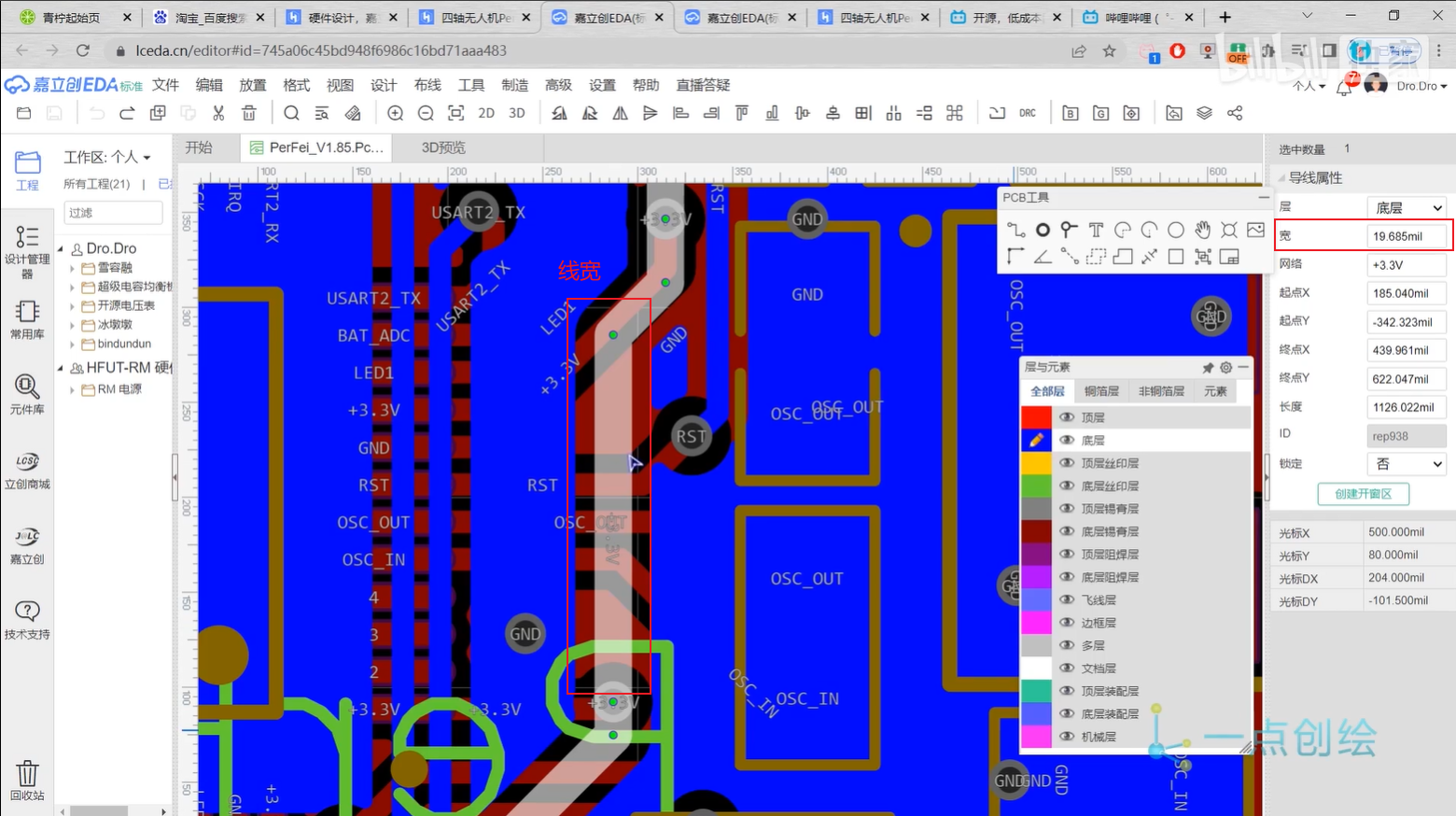
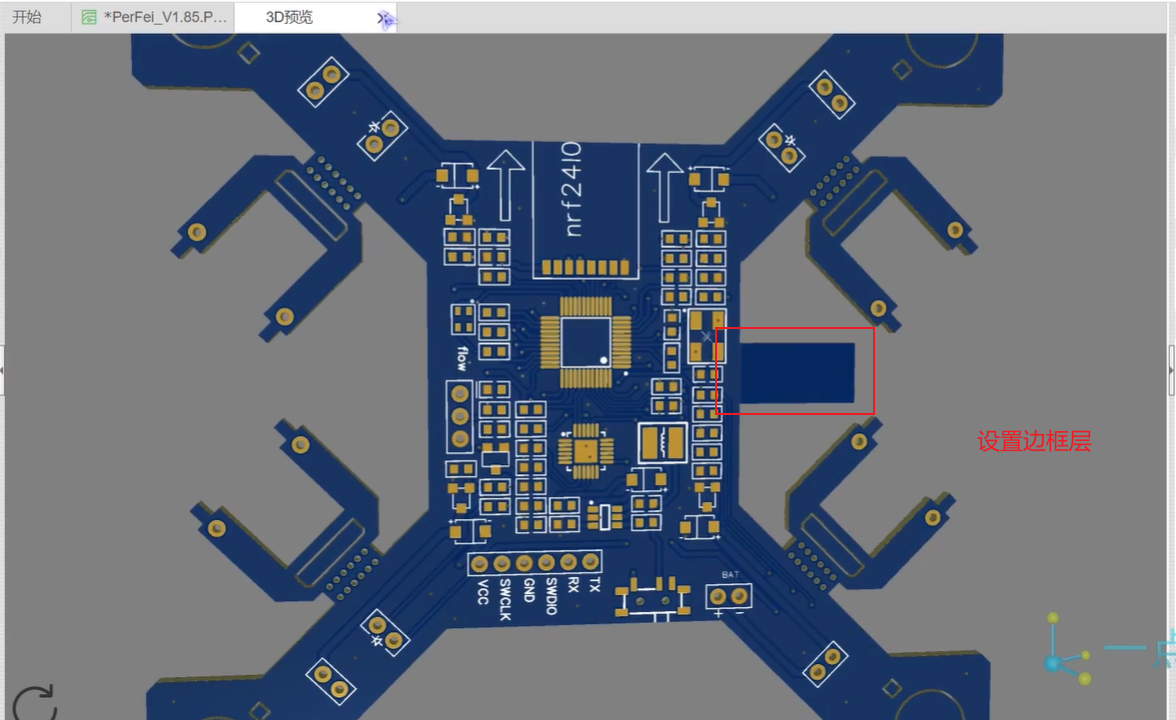
4. PCB設計
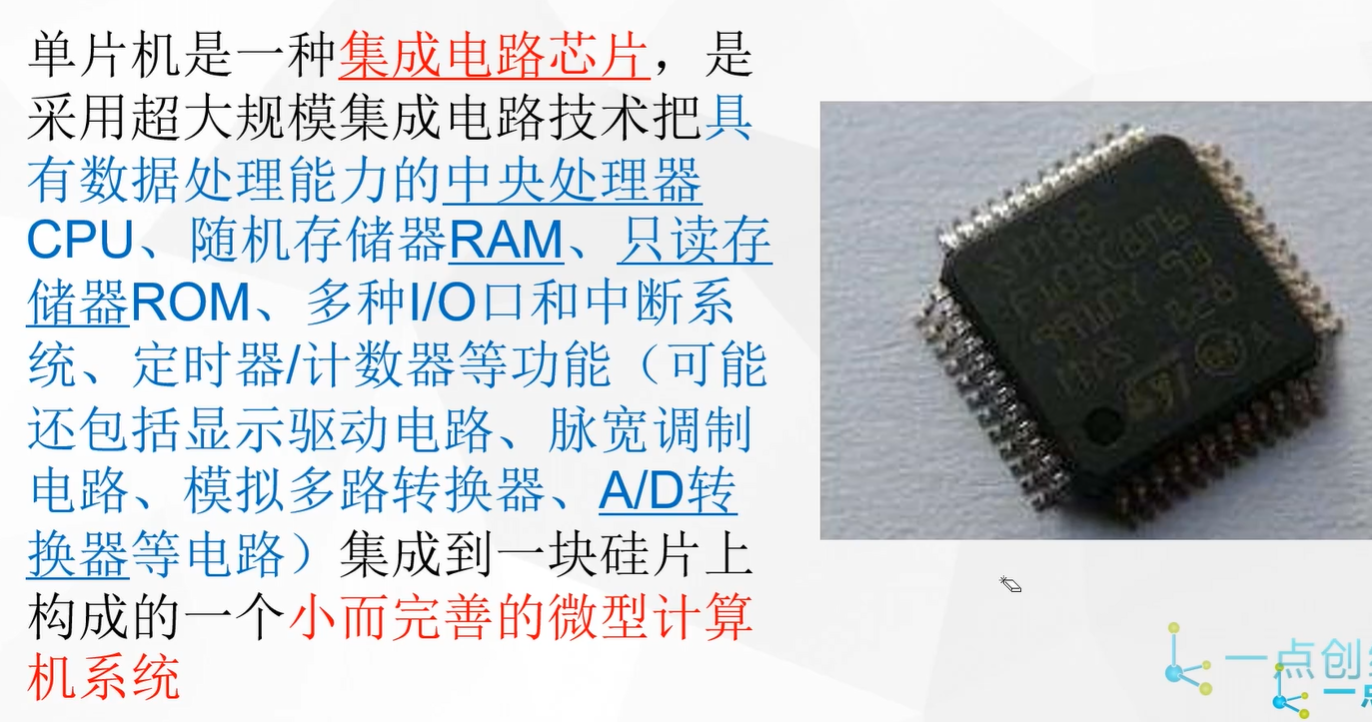
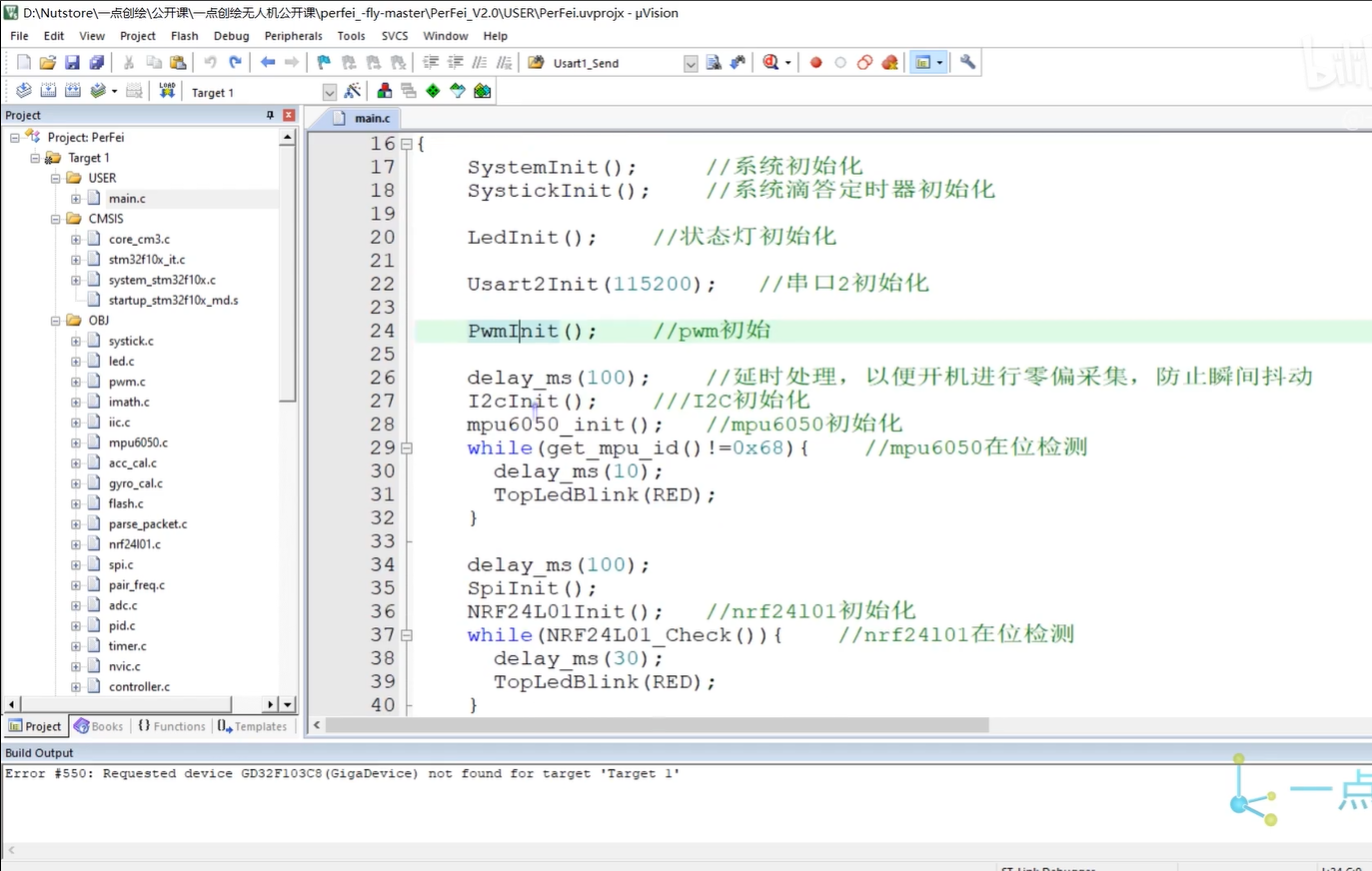
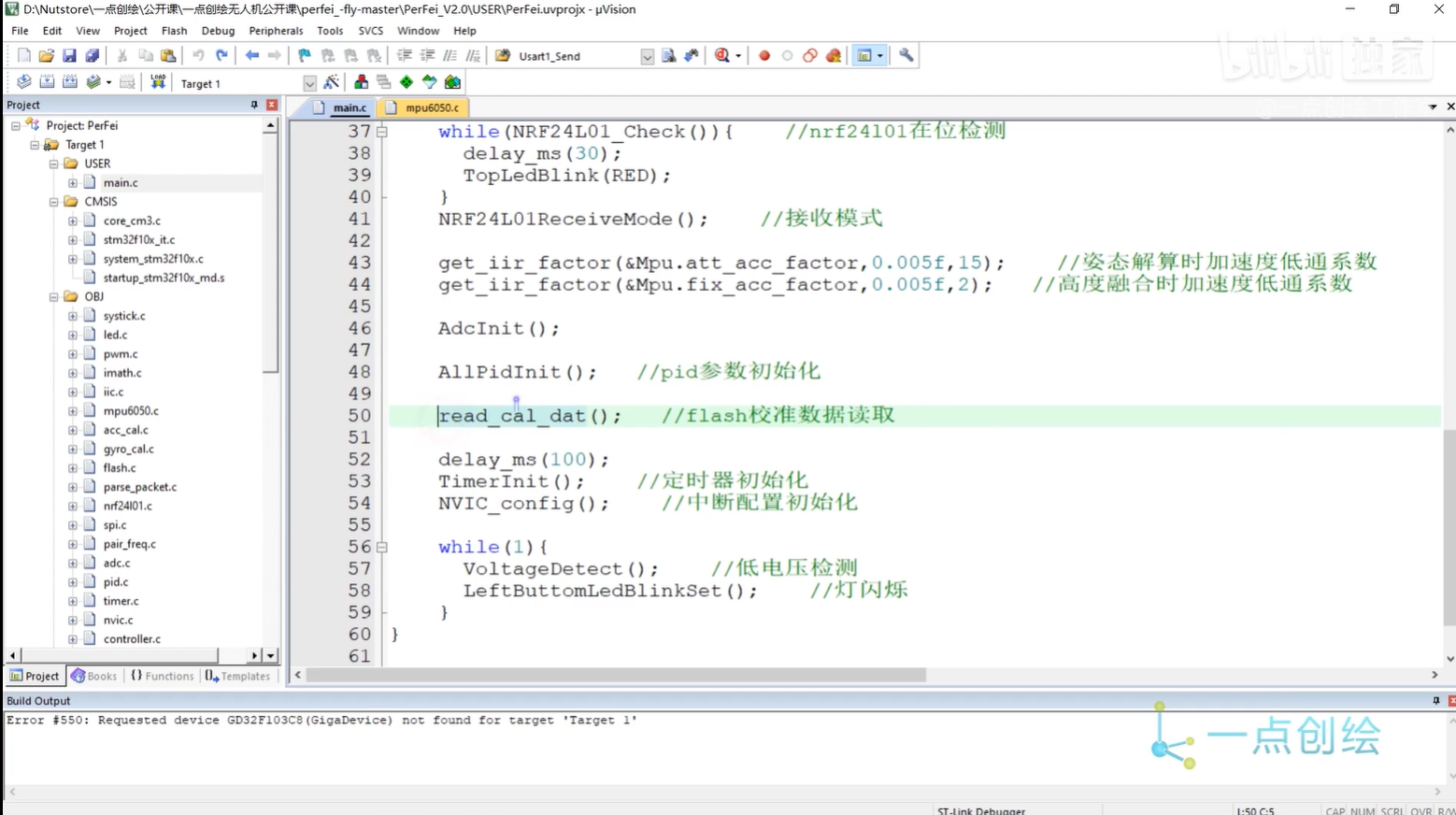
5. 單片機(軟體部分)
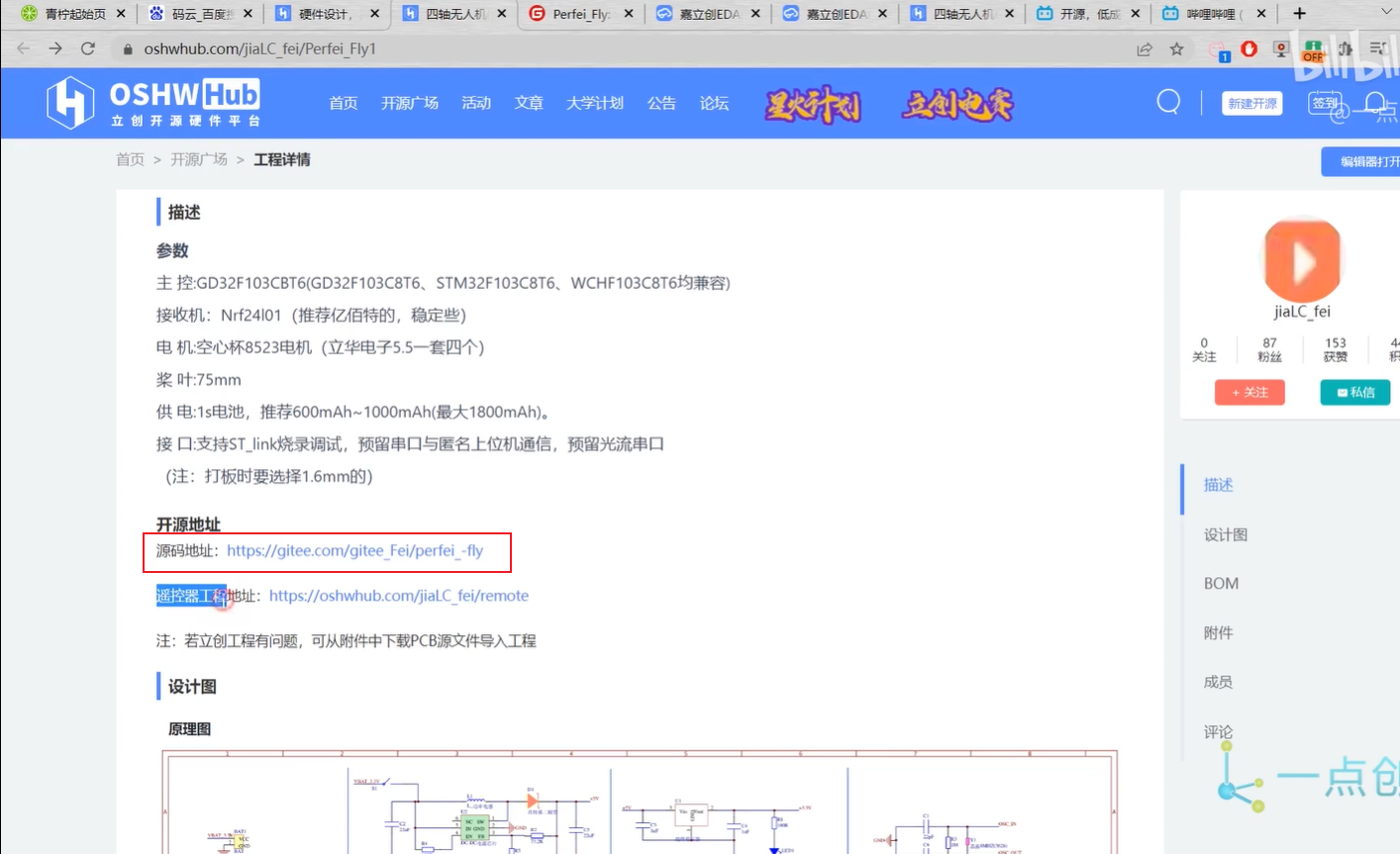
6. 獲取免費開源項目

7. PCB設計
8. 代碼部分
9. 開發流程圖