首先來看一下需要操作的函數,以及配置的步驟: 圖1 圖2 Code: usart.c #include "usart.h"void ustart_Init(void ){ GPIO_InitTypeDef GPIO_Init_Ustar ; // 定義輸出埠TX的結構體對象 USART_InitT ...
首先來看一下需要操作的函數,以及配置的步驟:
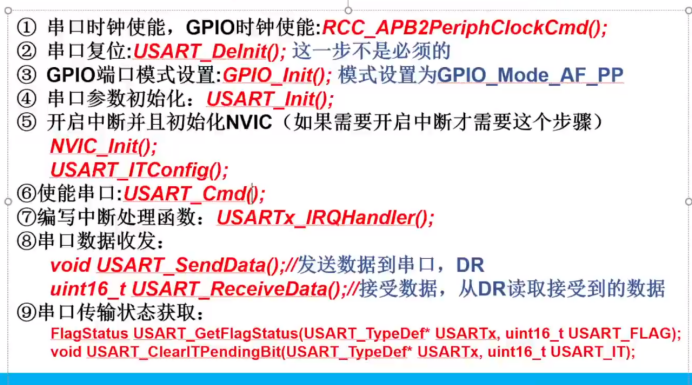
圖1
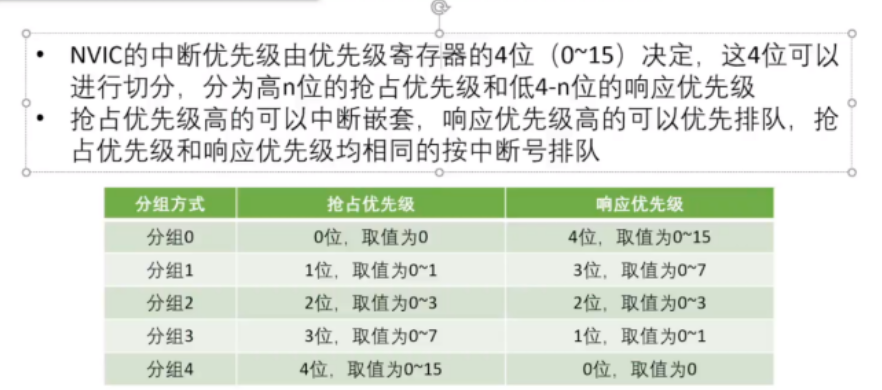
圖2
Code: usart.c
#include "usart.h"
void ustart_Init(void )
{
GPIO_InitTypeDef GPIO_Init_Ustar ; // 定義輸出埠TX的結構體對象
USART_InitTypeDef USTART_Init; // 定義串口初始化結構體對象
NVIC_InitTypeDef NVIC_InitStructure; // 定義中斷優先順序組結構體對象
//配置中斷優先順序,以及中斷的模式
NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2 ); //中斷組選擇器,也就是中斷組的模式的配置,此處選擇中斷組2
NVIC_InitStructure.NVIC_IRQChannel=USART1_IRQn ; // 設置中斷的模式,串口1中斷
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority= 1; //設置主優先順序,首先比較主,如果主優先順序相同,再進行比較子優先順序,如果前面的兩者都相同在比較中斷號,具體可以參考圖2
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1; // 設置子優先順序
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE ; //中斷使能,也就是打開中斷的意思
NVIC_Init(&NVIC_InitStructure); // 初始化中斷寄存器結構體
/* 配置輸出埠結構體配置及其初始化*/
RCC_APB2PeriphClockCmd( GPIO_USTAR_CLK , ENABLE ) ;// 打開GPIO時鐘
GPIO_Init_Ustar.GPIO_Pin= GPIO_USTAR_TX_PIN ; // 設置輸出埠
GPIO_Init_Ustar.GPIO_Speed=GPIO_Speed_50MHz; // 配置輸出的速度
GPIO_Init_Ustar.GPIO_Mode= GPIO_Mode_AF_PP; // 設置串口模式,設置為推輓輸出
GPIO_Init(GPIO_USTAR_PORT , & GPIO_Init_Ustar); // 初始化輸出埠的結構體
/* 配置輸入埠結構體配置及其初始化*/
GPIO_Init_Ustar.GPIO_Pin= GPIO_USTAR_RX_PIN ; // 設置輸出埠
GPIO_Init_Ustar.GPIO_Mode=GPIO_Mode_IN_FLOATING; // 設置串口模式,設置為浮空輸入
GPIO_Init(GPIO_USTAR_PORT , & GPIO_Init_Ustar); // 初始化輸出埠的結構體
//配置串口初始化結構體
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE ); // 打開串口時鐘
USTART_Init.USART_BaudRate= USART_BaudRate1 ; //配置傳輸的波特率
USTART_Init.USART_HardwareFlowControl=USART_HardwareFlowControl_None ; //配置硬體流,通常採用無流的方式進行
USTART_Init.USART_Mode=USART_Mode_Rx|USART_Mode_Tx ; // 設置是否啟用傳輸或者是接收模式,此處配置的是既可以接收,又可以發送
USTART_Init.USART_Parity=DISABLE; // 是否打開校驗位,此處不進行校驗
USTART_Init.USART_StopBits=USART_StopBits_1 ; //配置停止位
USTART_Init.USART_WordLength= USART_WordLength_8b ; // 配置長度
USART_Init(USART1,&USTART_Init); //通過定義的結構體初始化串口一
// 使能串口,註意串口進行了初始化需要進行使能,如果沒有進行使能那麼將無法進行使用
USART_Cmd(USART1,ENABLE );
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE) ; // 溢出中斷標誌,這裡一旦打開,當發生溢出時候,將回去執行中斷服務函數,否則將不會執行中斷服務函數
/* 註意這裡的中斷函數在stm32啟動文件中,不能自己隨意為中斷函數命名,需要自己去查找函數名稱,進行編寫是實現。註意函數名稱在啟動文件中,
一定不要自己隨便取函數名,這樣發生中斷的時候,也不會執行,所以程式竟會陷入死迴圈,並且沒有任何的現象*/
/*發送字元串的函數*/
}
void usart_TX_String(uint8_t *str){
while(*str!='\0') // 取出指針中的內容併進行判斷
{
USART_SendData(USART1 ,*str); // 發送一個數據
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); // 判斷發送數據是否結束,也就是相當於51單片機中的TI發送結束標誌位
str=str+1; // 註意這裡的指針的偏移只是偏移一個字元的所占的空間的大小。所以不能使用str++,因為這樣偏移的是一個指針整體的大小。
}
}
Code: usart.h
#ifndef _USART_H_
#define _USART_H_
#include "stm32f10x.h"
// GOPIO埠巨集定義
#define GPIO_USTAR_PORT GPIOA // 定義寄存器
#define GPIO_USTAR_TX_PIN GPIO_Pin_9 // 定義輸出埠
#define GPIO_USTAR_RX_PIN GPIO_Pin_10 // 定義輸入埠
#define GPIO_USTAR_CLK RCC_APB2Periph_GPIOA // 定義GPIO埠時鐘
//串口配置
#define USART_BaudRate1 9600 //設置串口的波特率
void ustart_Init(void ) ; // 串口初始化函數聲明
void usart_TX_String(uint8_t *str); // 發送一個字元串的函數申明
//註意;這裡不是變數的定義,這裡是申明,使用的extern進行變數的申明,格式和定義的格式必須相同,只是多一個關鍵子extern
extern uint8_t Buf[200]; //定義一個八位的數組,每一個數組元素都是一個位元組大小,數組的總長為200
extern uint16_t REC_STA; //用於接收計數,狀態標誌,這裡是一個16位變數,最大位#0xFFFF
#endif
void SysTick_Handler(void)
{
}
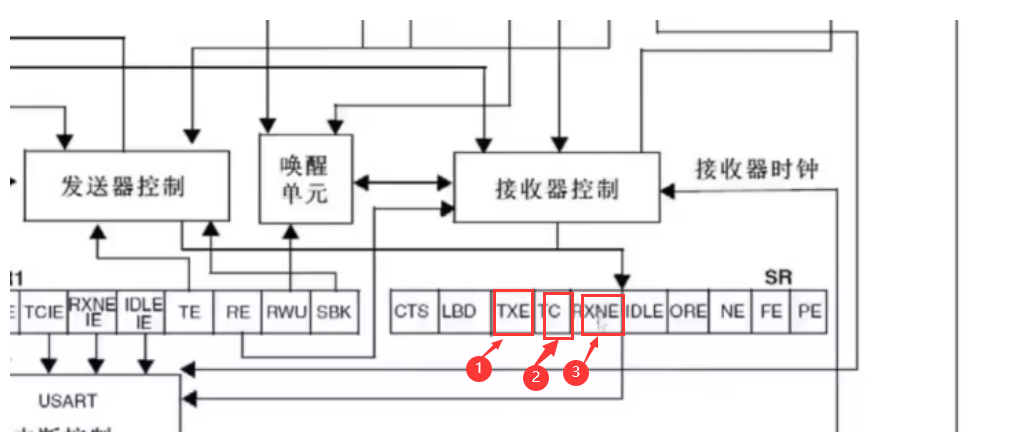
判斷數據發送是否完畢可以判斷: TXE 、 TC 位都可以
判斷數據是否接收到數據可以使用RXNE進行判斷
Code: 中斷處理函數:需要註意這裡的函數名稱不能自己隨意命名:startup_stm32f10x_hd.s中查找對應的串口的函數名稱。
void USART1_IRQHandler(void) {
uint8_t data=0; //接收數據臨時變數
if( USART_GetITStatus(USART1,USART_IT_RXNE)!= RESET)
{
data= USART_ReceiveData(USART1) ; //接收一個位元組數據
USART_SendData(USART1,data);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
}
}
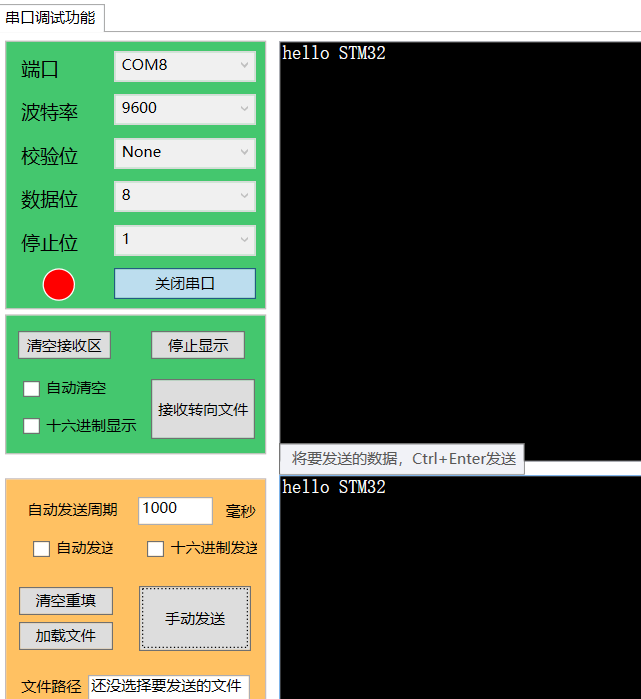
運行結果: