
首先先來瞭解一下TMC5160的3種工作模式 TMC5160通過兩個引腳來控制它的工作模式:SD_MODE和SPI_MODE。 1、當SD_MODE接地,SPI_MODE拉高,TMC5160即工作在模式1(SPI控制模式)。在該模式下,用戶通過SPI介面來設置TMC5160的寄存器。 TMC5160 ...

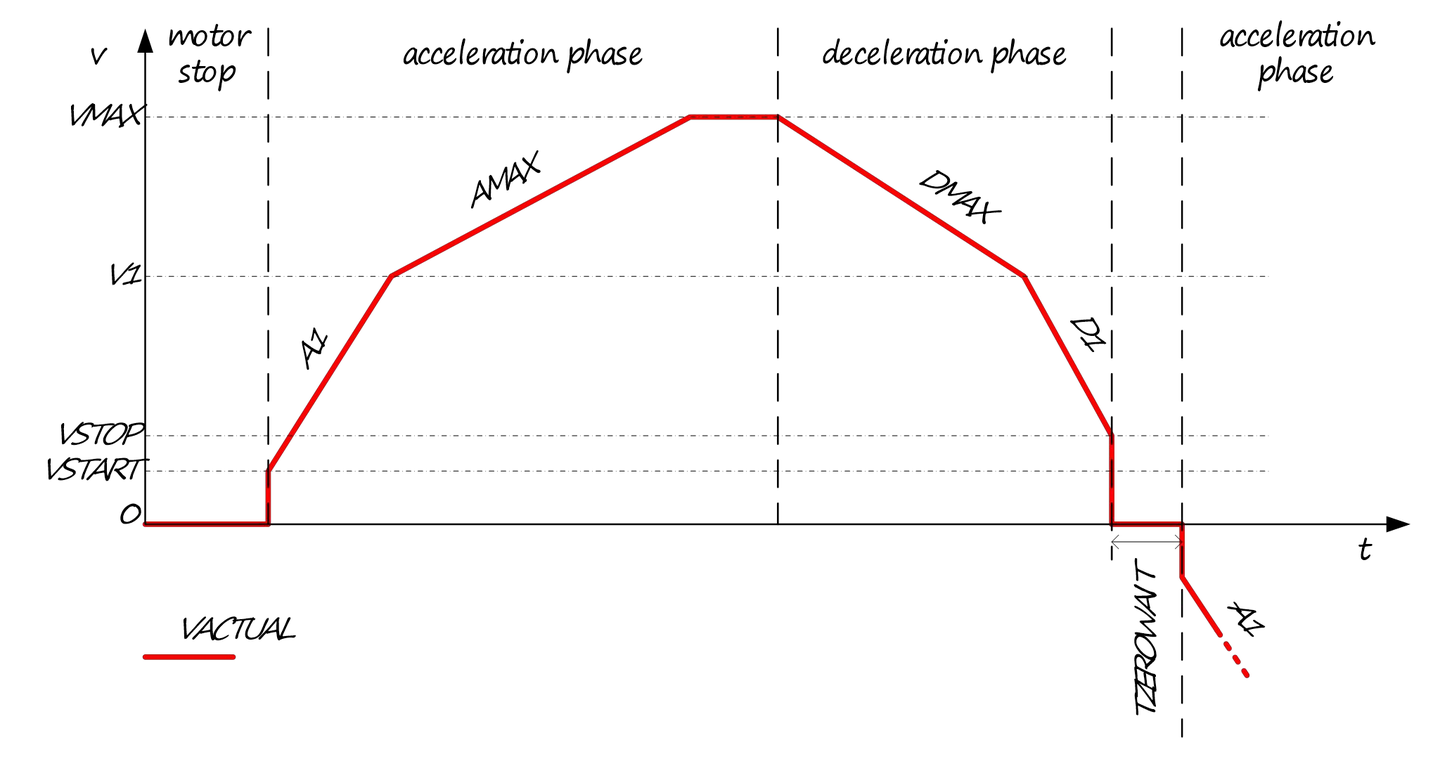
首先先來瞭解一下TMC5160的3種工作模式 TMC5160通過兩個引腳來控制它的工作模式:SD_MODE和SPI_MODE。 1、當SD_MODE接地,SPI_MODE拉高,TMC5160即工作在模式1(SPI控制模式)。在該模式下,用戶通過SPI介面來設置TMC5160的寄存器。 TMC5160使用自己的梯形曲線發生器來控制步進電機轉動,用戶需要設置:開始運動速度VSTART、第一段折線末速度V1、最大速度VMAX、停止速度VSTOP、第一段折線的加速度A1、第二段折線加速度AMAX、第四段折線的減速度DMAX、第五段折線的減速度D1。把上面的參數設置好,再設置工作模式:速度模式和位置模式。最後再設置目標位置。 如果是速度模式運行,不需要設置目標位置,電機就會開始轉動。如果是位置模式,則需要設置目標位置,且目標位置與電機當前位置值不同電機才會轉動。下圖中的紅線是電機的實際速度,不管是速度模式還是位置模式,電機的運行過程會按照下圖來進行。
 2、當SD_MODE接高電平,SPI_MODE拉高,TMC5160工作在模式2(SPI+S/D)。在該模式下,用戶通過SPI介面來設置TMC5160的寄存器。TMC5160的功能和DRV8825類似,外界通過脈衝和方向引腳來控制步進電機運動。
3、當SD_MODE接高電平,SPI_MODE接地,TMC5160工作在模式3(S/D獨立模式)。在該模式下,SPI介面失能,TMC5160的工作狀態由CFG引腳配置,外界通過脈衝和方向引腳來控制步進電機運動。TMC5160可以完全獨立工作,不需要接CPU。
目前是實現電機的簡單轉動,下麵將用模式三來控制電機。
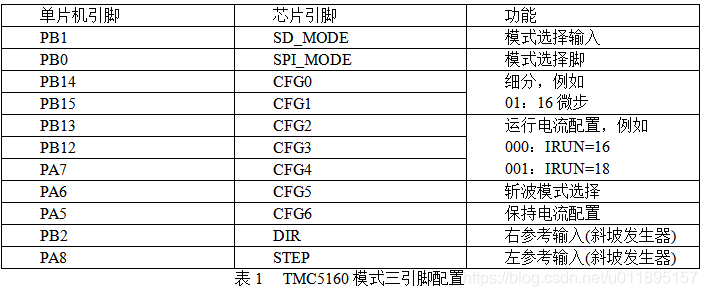
該模式下不需要通過SPI通訊,配置相關GPIO引腳和發送頻率一定的正弦波即可。TMC5160的GPIO和STM32的引腳對應如下表:
2、當SD_MODE接高電平,SPI_MODE拉高,TMC5160工作在模式2(SPI+S/D)。在該模式下,用戶通過SPI介面來設置TMC5160的寄存器。TMC5160的功能和DRV8825類似,外界通過脈衝和方向引腳來控制步進電機運動。
3、當SD_MODE接高電平,SPI_MODE接地,TMC5160工作在模式3(S/D獨立模式)。在該模式下,SPI介面失能,TMC5160的工作狀態由CFG引腳配置,外界通過脈衝和方向引腳來控制步進電機運動。TMC5160可以完全獨立工作,不需要接CPU。
目前是實現電機的簡單轉動,下麵將用模式三來控制電機。
該模式下不需要通過SPI通訊,配置相關GPIO引腳和發送頻率一定的正弦波即可。TMC5160的GPIO和STM32的引腳對應如下表:
 先將SD_MODE接地,SPI_MODE拉高(PB1=1,PB=0),進入獨立模式。
其它引腳的參數可以參考TMC5160數據手冊根據自己的需求進行設置。初始化程式如下:
先將SD_MODE接地,SPI_MODE拉高(PB1=1,PB=0),進入獨立模式。
其它引腳的參數可以參考TMC5160數據手冊根據自己的需求進行設置。初始化程式如下:
void TMC5160_Init3(void) //模式三獨立模式 { GPIO_InitTypeDef GPIO_Initure; __HAL_RCC_GPIOB_CLK_ENABLE(); //開啟GPIOB時鐘 __HAL_RCC_GPIOA_CLK_ENABLE(); //開啟GPIOA時鐘 GPIO_Initure.Pin=GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7|GPIO_PIN_8; GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推輓輸出 GPIO_Initure.Pull=GPIO_PULLUP; //上拉 GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速 HAL_GPIO_Init(GPIOA,&GPIO_Initure); GPIO_Initure.Pin=GPIO_PIN_0|GPIO_PIN_1|GPIO_PIN_2|GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15; GPIO_Initure.Mode=GPIO_MODE_OUTPUT_PP; //推輓輸出 GPIO_Initure.Pull=GPIO_PULLUP; //上拉 GPIO_Initure.Speed=GPIO_SPEED_FREQ_HIGH; //高速 HAL_GPIO_Init(GPIOB,&GPIO_Initure); HAL_GPIO_WritePin(GPIOA,GPIO_PIN_6|GPIO_PIN_5,GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOA,GPIO_PIN_7,GPIO_PIN_RESET); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_14|GPIO_PIN_13|GPIO_PIN_12|GPIO_PIN_1,GPIO_PIN_SET); HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15|GPIO_PIN_2|GPIO_PIN_0,GPIO_PIN_RESET); }然後PA8需要輸出PWM方波,方波的頻率決定電機轉動速度,可以用PWM通道的方式搞定,也可以用定時器中斷來做,這邊採用定時器中斷的方法, 例如,STM32F103的時鐘頻率為72M,分頻設為72,裝載值設為500,每0.5ms中斷一次,PA8電平取反,1KHZ的方波就完成了。頻率可以改變。程式如下:
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if(htim==(&TIM3_Handler)) { COUNT++; A8=~A8; if(COUNT>=6400) { //HAL_NVIC_DisableIRQ(TIM3_IRQn); LED=1; //轉一圈,停2s後繼續 delay_ms(2000); LED=0; COUNT=0; } } }實現的功能是讓電機轉1圈後停2s後繼續。 採用四相電機,脈衝數控制電機轉多少,電機步距角位1.8°,一個脈衝轉1.8°,200個脈衝一圈,採用16細分,那麼一圈就需要3200個脈衝。 電機轉動的速度就由脈衝頻率決定,可以根據細分及脈衝頻率來換算電機實際轉速。

