
首先,先上結構圖,請對照代碼理解。 (一)什麼是任務切換? 任務切換就是在就緒列表裡面尋找優先順序最高的就緒任務,然後執行該任務。 (二)任務什麼時候切換? 1)、當執行系統調用的時候,進行任務切換。 2)、當發生滴答定時器(systick)中斷的時候,進行任務切換。 情況1:執行系統調用時 所謂的系 ...
首先,先上結構圖,請對照代碼理解。
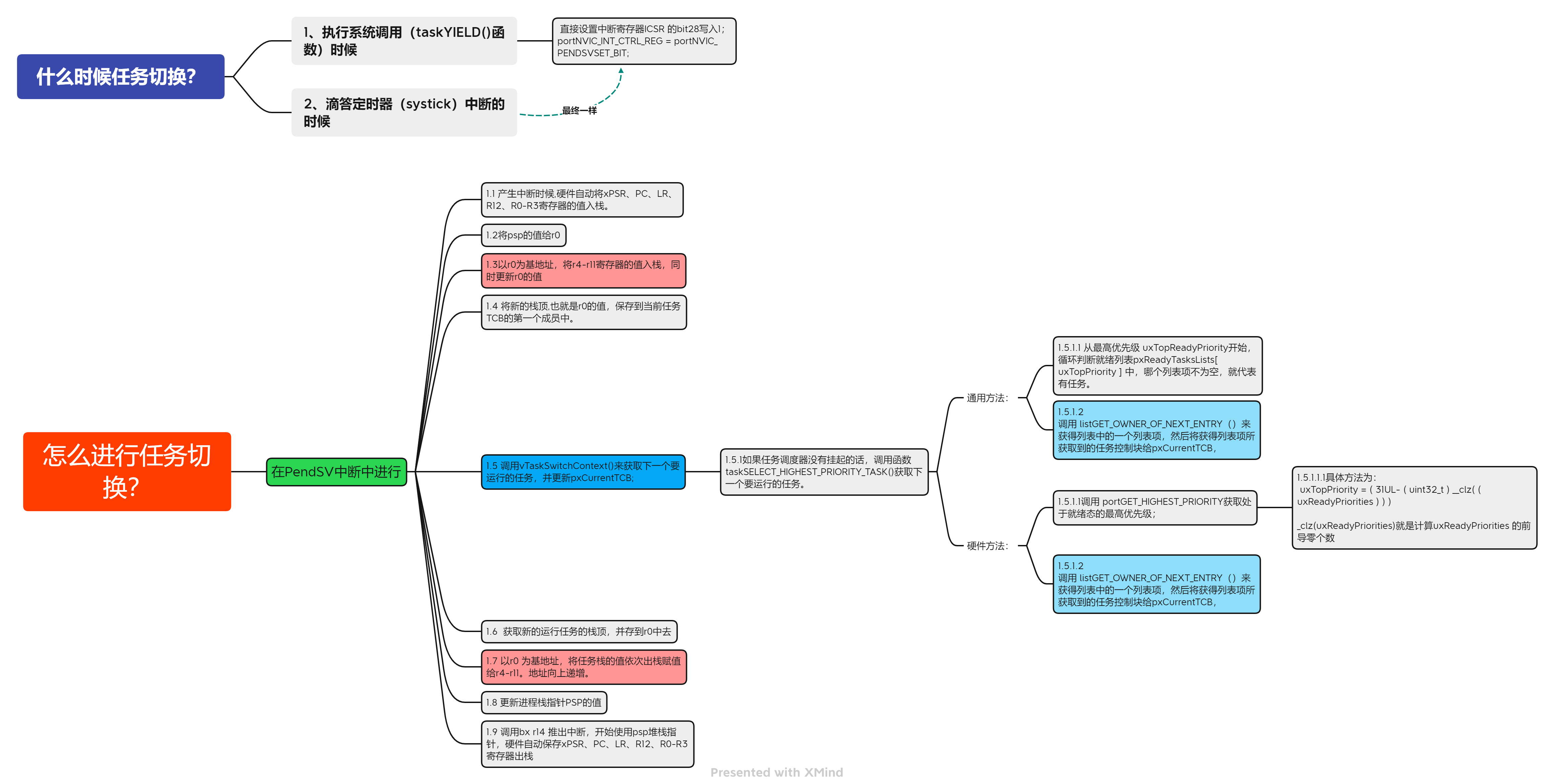
(一)什麼是任務切換?
任務切換就是在就緒列表裡面尋找優先順序最高的就緒任務,然後執行該任務。
(二)任務什麼時候切換?
1)、當執行系統調用的時候,進行任務切換。
2)、當發生滴答定時器(systick)中斷的時候,進行任務切換。
情況1:執行系統調用時
所謂的系統調用就是指執行taskYIELD()函數。taskYIELD()是一個巨集。
#define taskYIELD() portYIELD()
接著往下看 portYIELD()函數,它也是一個巨集。
#define portYIELD() { portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; __dsb( portSY_FULL_READ_WRITE ); __isb( portSY_FULL_READ_WRITE ); }
通過向中斷控制和狀態寄存器ICSR的bit28寫入1掛起PendSV,來啟動PendSV中斷。portNVIC_PENDSVSET_BIT 的值為如下巨集定義。
#define portNVIC_PENDSVSET_BIT ( 1UL << 28UL )
情況2:發生滴答定時器(systick)中斷的時候
OK,第一種情況很簡單,來看看第二種情況,
void SysTick_Handler(void) { if(xTaskGetSchedulerState()!=taskSCHEDULER_NOT_STARTED)//系統已經運行 { xPortSysTickHandler(); } }
定時器中斷中,調用了 xPortSysTickHandler()函數。此函數具體如下:
void xPortSysTickHandler( void ) { vPortRaiseBASEPRI(); //關閉中斷 { if( xTaskIncrementTick() != pdFALSE ) //增加時鐘計數器 xTickCount 的值 { portNVIC_INT_CTRL_REG = portNVIC_PENDSVSET_BIT; //置為ICSR寄存器bit28來掛起PendSV異常。 } } vPortClearBASEPRIFromISR(); //打開中斷 }
可以看出 xPortSysTickHandler()函數,和portYIELD()函數是通過一樣的方法來啟動任務切換的。
(三)如何進行任務切換?
PendSV中斷中的xPortPendSVHandler()是真正實現任務切換的地方,我們來看看源碼:
__asm void xPortPendSVHandler( void ) { extern uxCriticalNesting; extern pxCurrentTCB; extern vTaskSwitchContext; PRESERVE8 //棧的8位元組對齊 mrs r0, psp //讀取當前psp進程指針,存入r0 isb /* 獲取當前任務控制塊 */ ldr r3, =pxCurrentTCB //把pxCurrentTCB的地址給R3,(註意pxCurrrentTCB本身是指針變數),所以r3是地址的地址。 ldr r2, [r3] //把r3地址中的值給r2,r2中就存儲當前的任務控制塊 stmdb r0!, {r4-r11, r14} // 以R0為基地址,依次向下遞減,將寄存器r4-r11存儲到任務棧。 /* 保存最新的棧頂指針到當前任務控制塊的第一欄位*/ str r0, [r2] //把r0的值存入r2的地址,相當於*r2 = r0 stmdb sp!, {r3} //將寄存器R3的值臨時壓棧,寄存器r3中仍然保存著當前任務的任務控制塊, //而接下來要調用函數vTaskSwitchContext,防止r3的值被改寫,故臨時壓棧 mov r0, #configMAX_SYSCALL_INTERRUPT_PRIORITY msr basepri, r0 //關中斷,進入臨界區 dsb isb bl vTaskSwitchContext //調用函數vTaskSwitchContext,此函數用來獲取下一個要運行的任務,並將pxCurrentTCB更新為要運行的這個任務 mov r0, #0 msr basepri, r0 //開中斷,退出臨界區 ldmia sp!, {r3} //剛剛保存的寄存器R3的值出棧,恢復寄存器R3的值。註意,經過調用函數vTaskSwitchContext,此時 //pxCurrentTCB的值已經改變了,所以讀取R3所保存的地址處的數據就會發現其值改變了,成 //為了下一個要運行的任務的任務控制塊。 ldr r1, [r3] ldr r0, [r1] //獲取新的運行任務的棧頂,並存到r0中去 /* 出棧內核寄存器中的值 */ ldmia r0!, {r4-r11, r14} //含義::依次出棧 ,將任務棧的值依次出棧賦值給r4-r11。地址向上遞增。 msr psp, r0 //更新進程棧指針PSP的值 isb bx r14 //執行此行代碼以後硬體自動恢復寄存器R0~R3、R12、LR、PC和xPSR的值,
確定異常返回以後應該進入處理器模式還是進程模式,使用主棧指針(MSP)還是進程棧指針(PSP)。
很明顯這裡會進入進程模式,並且使用進程棧指針(PSP), 寄存器PC值會被恢復為即將運行的任務的任務函數,新的任務開始運行!
}
ok。這段PendSV中斷服務函數還是比較難以理解的,不懂的可以跳過。接下來看看調用的vTaskSwitchContext()來獲取下一個要運行的任務是怎麼操作的。
void vTaskSwitchContext( void ) { if( uxSchedulerSuspended != ( UBaseType_t ) pdFALSE ) //如果任務調度器掛起,那麼不進行任務切換 { xYieldPending = pdTRUE; } else { xYieldPending = pdFALSE; traceTASK_SWITCHED_OUT();
taskCHECK_FOR_STACK_OVERFLOW();
taskSELECT_HIGHEST_PRIORITY_TASK(); //調用函數 taskSELECT_HIGHEST_PRIORITY_TASK()獲取下一個要運行的任務。
traceTASK_SWITCHED_IN();
}
}
taskSELECT_HIGHEST_PRIORITY_TASK()本質上是一個巨集,在 tasks.c 中有定義。
FreeRTOS 中查找下一個要運行的任務有兩種方法:一個是通用的方法,另外一個就是使用
硬體的方法,這個在我們講解 FreeRTOSCofnig.h 文件的時候就提到過了,至於選擇哪種方法通
過巨集 configUSE_PORT_OPTIMISED_TASK_SELECTION 來決定的。當這個巨集為 1 的時候就使
用硬體的方法,否則的話就是使用通用的方法。
1、通用方法:
#define taskSELECT_HIGHEST_PRIORITY_TASK() { UBaseType_t uxTopPriority = uxTopReadyPriority; while( listLIST_IS_EMPTY( &( pxReadyTasksLists[ uxTopPriority ] ) ) ) { configASSERT( uxTopPriority ); --uxTopPriority; } listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) );
uxTopReadyPriority = uxTopPriority; }
pxReadyTasksLists[]為就緒任務列表數組,每一個優先順序都有一個就緒列表。通用方法就是通過while迴圈,從最高優先順序 uxTopReadyPriority開始,
迴圈判斷就緒列表中,哪個不為空。然後再將 uxTopPriority遞減,並且記錄有就緒任務的優先順序。
找到了有就緒任務的優先順序之後,接下來調用 listGET_OWNER_OF_NEXT_ENTRY()來獲得列表中的一個列表項,然後將獲得列表項所獲取到的任務控制塊給pxCurrentTCB,這樣就找到了下一個要運行的任務。
這種方法對於任務的數量沒有限制,效率不高。
2、硬體方法:
#define taskSELECT_HIGHEST_PRIORITY_TASK() { UBaseType_t uxTopPriority;
portGET_HIGHEST_PRIORITY( uxTopPriority, uxTopReadyPriority); //獲取處於就緒態的最高優先順序;
configASSERT( listCURRENT_LIST_LENGTH( & ( pxReadyTasksLists[ uxTopPriority ] ) )> 0 );
listGET_OWNER_OF_NEXT_ENTRY( pxCurrentTCB, &( pxReadyTasksLists[ uxTopPriority ] ) ); //這一步與通用方法一樣;獲得列表中的列表項,
//然後獲取相應的任務控制塊給pxCurrrentTCB; }
portGET_HIGHEST_PRIORITY 本質上是個巨集,定義如下
#define portGET_HIGHEST_PRIORITY( uxTopPriority, uxReadyPriorities ) uxTopPriority = ( 31UL- ( uint32_t ) __clz( ( uxReadyPriorities ) ) )
註意使用硬體方法的時候,uxTopReadyPriority 就不代表處於就緒態的最高優先順序了,而是每個bit 代表一個優先順序,bit0 代表優先順序0,當某個優先順序有任務的話,就將相應的bit置為1。
__clz(uxReadyPriorities)就是計算 uxReadyPriorities 的前導零個數,前導零個數就是指從最高位開始(bit31)到第一個為 1 的 bit,其間 0 的個數。然後用31減去前導0個數,就得到處於就緒態的最高優先順序了。


