
項目名稱:模擬電壓表系統設計 項目功能:實現0 ~ 5V、5 ~ 10V雙量程電壓測量並顯示 本項目是在這次疫情下,大三學期的課程設計,自己辛苦了一夜,最後成績得了優(哈哈哈哈)。下麵簡單說明一下本項目,為像我一樣笨手笨腳的同學提供些經驗(嘻嘻嘻嘻)。 硬體部分 MCU:89C51 顯示模塊:LCD ...
-
項目名稱:模擬電壓表系統設計
-
項目功能:實現0 ~ 5V、5 ~ 10V雙量程電壓測量並顯示
本項目是在這次疫情下,大三學期的課程設計,自己辛苦了一夜,最後成績得了優(哈哈哈哈)。下麵簡單說明一下本項目,為像我一樣笨手笨腳的同學提供些經驗(嘻嘻嘻嘻)。
硬體部分
- MCU:89C51
- 顯示模塊:LCD1602
- 模數轉換:ADC0808
- 警報:蜂鳴器
- 電壓採集:採集電路
軟體部分:
該部分無非是驅動及數據處理。
首先是驅動:
LCD1602.h
#ifndef __LCD1602_H__
#define __LCD1602_H__
#define uchar unsigned char
#define uint unsigned int
/******LCD埠設置******/
sbit LcdEn = P3^7;
sbit LcdRw = P3^6;
sbit LcdRs = P3^5;
/******定義測量按鍵******/
sbit Start = P3^2;
sbit Stop = P3^3;
void LcdDisplay();
void LcdPrintL1(char* str); /*第一行整屏左移顯示*/
void LcdPrint1(char* str); /*第一行顯示*/
void LcdPrint11(char* str); /*第一行顯示,不清屏·*/
void LcdPrint2(char* str); /*第二行顯示,不清屏*/
void WriteCom(uchar comData);
void WriteData(uchar Data);
void Delay_ms(unsigned int n);
void Delay_10ms();
#endif
LcdDisplay.c
/******LCD驅動及顯示******/
#include<reg51.h>
#include"LCD1602.h"
#define uchar unsigned char
#define uint unsigned int
extern code uchar table1[];
extern code uchar table2[];
extern code uchar table3[];
extern code uchar table4[];
extern code uchar table5[];
uchar num = 0;
/*-----------------LCD驅動程式----------------*/
/*******LCD寫命令*******/
void WriteCom(uchar comData){
LcdRs = 0; //寫命令
LcdRw = 0; //寫選擇端
//Delay_ms(5); //
P0 = comData; //將數據送達數據線
LcdEn = 1; //開始能
Delay_ms(5);
LcdEn = 0; //關始能
}
/******LCD寫數據*******/
void WriteData(uchar Data){
LcdRs = 1; //寫數據
LcdRw = 0; //寫選擇
P0 = Data;
Delay_ms(5);
LcdEn = 1;
Delay_ms(5);
LcdEn = 0;
}
/*---------------LCD初始化---------------*/
void LcdDisplay(){
LcdRw = 0;
LcdEn = 0;
WriteCom(0x38); //設置16x2顯示,5x7點陣,8位數據介面
WriteCom(0x0c); //設置開顯示,不顯示游標
Delay_ms(1);
WriteCom(0x06); //寫一個字元後地址指針加1
WriteCom(0x01); //顯示清零,數據指針清零
Delay_ms(1);
WriteCom(0x80); //游標位置初始化
while(table1[num]!='\0'){ //沒有換行符,一直執行
WriteData(table1[num]);
num++;
Delay_ms(2);
}
Delay_ms(1000);
}
/*---------------LCD顯示指令--------------*/
/*******第一行顯示指令*******/
void LcdPrint1(char* str){
uchar i = 0;
WriteCom(0x01);
WriteCom(0x80);
for(i=0;str[i]!=0;i++)
WriteData(str[i]);
}
/*******第一行顯示指令,不清屏*******/
void LcdPrint11(char* str){
uchar i = 0;
// WriteCom(0x01);
WriteCom(0x80);
for(i=0;str[i]!=0;i++)
WriteData(str[i]);
}
/******第二行顯示指令******/
void LcdPrint2(char* str){
uchar i = 0;
WriteCom(0x80 + 0x40);
for(i=0;str[i]!=0;i++)
WriteData(str[i]);
}
/******第一行整屏左移顯示指令******/
void LcdPrintL1(char* str){
uchar i = 0;
WriteCom(0x01); //顯示清零,指針清零
WriteCom(0x80);
for(i=0;str[i]!=0;i++)
WriteData(str[i]);
Delay_ms(150);
num = 0;
while(table4[num]!='\0'){
WriteCom(0x18); //整屏左移指令
num++;
Delay_ms(150); //控制移動速度
}
}
ADC0808.h
#ifndef __ADC0808_H__
#define __ADC0808_H__
#define uchar unsigned char
#define uint unsigned int
/******ADC0808埠設置******/
sbit START = P3^1; /*A/D轉換啟動信號,正脈衝有效*/
sbit EOC = P3^0; /*轉換結束信號,高電平有效;該信號在A/D轉換過程中為低電平,其餘時間為高電平*/
sbit OE = P3^4; /*轉換允許信號*/
/******定義ADC數據選擇埠******/
sbit a = P1^0;
sbit b = P1^1;
sbit c = P1^2;
/******定義量程選擇埠******/
sbit K1 = P1^3;
sbit K2 = P1^4;
uint ReadData();
void AdStar();
void SetData0(uchar addr,uint Data);
void SetData1(uchar addr,uint Data);
void DataSelector();
#endif
BuzzerWarning.c
/******BuzzerWarning******/
#include<reg51.h>
#include"LCD1602.h"
#include"ADC0808.h"
#define uchar unsigned char
#define uint unsigned int
extern code uchar table5[];
extern code uchar table6[];
sbit SPEAKER = P1^7;
void BuzzerWarning0_5V(){
uint t,i;
//SPEAKER = 1;
//LcdPrint11(table5);
for(t=0;t<3;t++){
for(i=0;i<35;i++)
Delay_10ms();
SPEAKER =~ SPEAKER;
}
SPEAKER = 1;
Delay_ms(800);
}
主函數部分:
main.c
#include<reg51.h>
#include<intrins.h>
#include"LCD1602.h"
#include"ADC0808.h"
#include<stdio.h>
#define uchar unsigned char
#define uint unsigned int
code uchar tablea[]="0123456789";
code uchar tableb[]="Voltage:00.00 V";
code uchar table1[]={"System ready."};
code uchar table2[]={"Press STAR to start measuring."};
code uchar table3[]={"Measuring... "};
code uchar table4[]={"Measurement end."};
code uchar table5[]={"Maximum range."};
code uchar table6[]={"Minimum range"};
uchar res = 0;
bit flag1 = 0;
bit flag2 = 1;
bit flag3 = 1;
uchar k = 1;
void Interrupt_eint();
void StartInt0();
void StopInt1();
void main(void){
/*------系統初始化------*/
LcdDisplay();
Interrupt_eint();
while(!IE0 && !IE1) LcdPrintL1(table2);
/*------系統運行------*/
while(1){
StartInt0();
StopInt1();
}
}
下麵是數據處理部分及按鍵部分,由於老師要求有兩個按鍵即:開始按鍵、結束按鍵;又由於在系統啟動後會有字幕的提示信息,且提示信息是以滾動的方式顯示的,所以這個項目的按鍵部分採用了中斷的方式進行實現(效果:在提示信息顯示及系統運行的任何時候都可以隨時按下按鍵)。
註意:在系統剛啟動後,只能按下 START按鍵,按下STOP按鍵無效,這是在程式中設計好的。
下麵是程式:
Interrupt.c
/******利用外部中斷函數實現按鍵功能******/
#include<reg51.h>
#include"LCD1602.h"
#include"ADC0808.h"
#define uchar unsigned char
#define uint unsigned int
extern code uchar tablea[];
extern code uchar tableb[];
extern code uchar table1[]; /*系統準備就緒*/
extern code uchar table2[]; /*請按“Start”開始測量*/
extern code uchar table3[]; /*正在測量*/
extern code uchar table4[]; /*測量結束*/
extern code uchar table5[];
extern code uchar table6[];
extern uchar res; /*接收數據*/
extern bit flag2;
extern bit flag3;
void BuzzerWarning0_5V();
/******中斷初始化******/
void Interrupt_eint(){
EX0 = 1; //開啟外部中斷0
IT0 = 0; //設置外部中斷0觸發模式:低電平觸發
EX1 = 1; //開啟外部中斷1
IT1 = 0; //設置外部中斷1觸發模式
EA = 1; //開啟總中斷
PX0 = 1; //將外部中斷的優先順序提高
}
/******外部0中斷服務函數******/
void StartInt0() interrupt 0{
if(IE0 && flag2 == 1){ //按下START
Delay_10ms();
flag2 = 0;
LcdPrint1(table3);
LcdPrint2(tableb);
while(!IE1){
WriteCom(0x80+0x40+8);
AdStar();
res = ReadData();
if(flag3){
SetData0(8,res);
if((res*1.0/255*500)/100 == 5){//判斷電壓是否超過或等於 5 V
LcdPrint11(table5);
BuzzerWarning0_5V();
}
else
LcdPrint11(table3);
}
else{
SetData1(8,res);
if(res*1.0/255*500*3 >= 1000){//判斷電壓是否超過或等於 10 V
LcdPrint11(table5);
BuzzerWarning0_5V();
}
else if(res*1.0/255*500*3/100 < 5){
LcdPrint11(table6);
BuzzerWarning0_5V();
}
else
LcdPrint11(table3);
}
}
}
}
/******外部1中斷服務函數******/
void StopInt1() interrupt 2{
if(IE1 && flag2 == 0){ //按下STOP
Delay_10ms();
flag2 = 1;
LcdPrint1(table4);
LcdPrint2(tableb);
res = ReadData();
if(flag3)
SetData0(8,res);
else
SetData1(8,res);
while(!IE0);
}
}
以上就是所有的源程式啦。程式中也有些小細節,大多都有註釋。
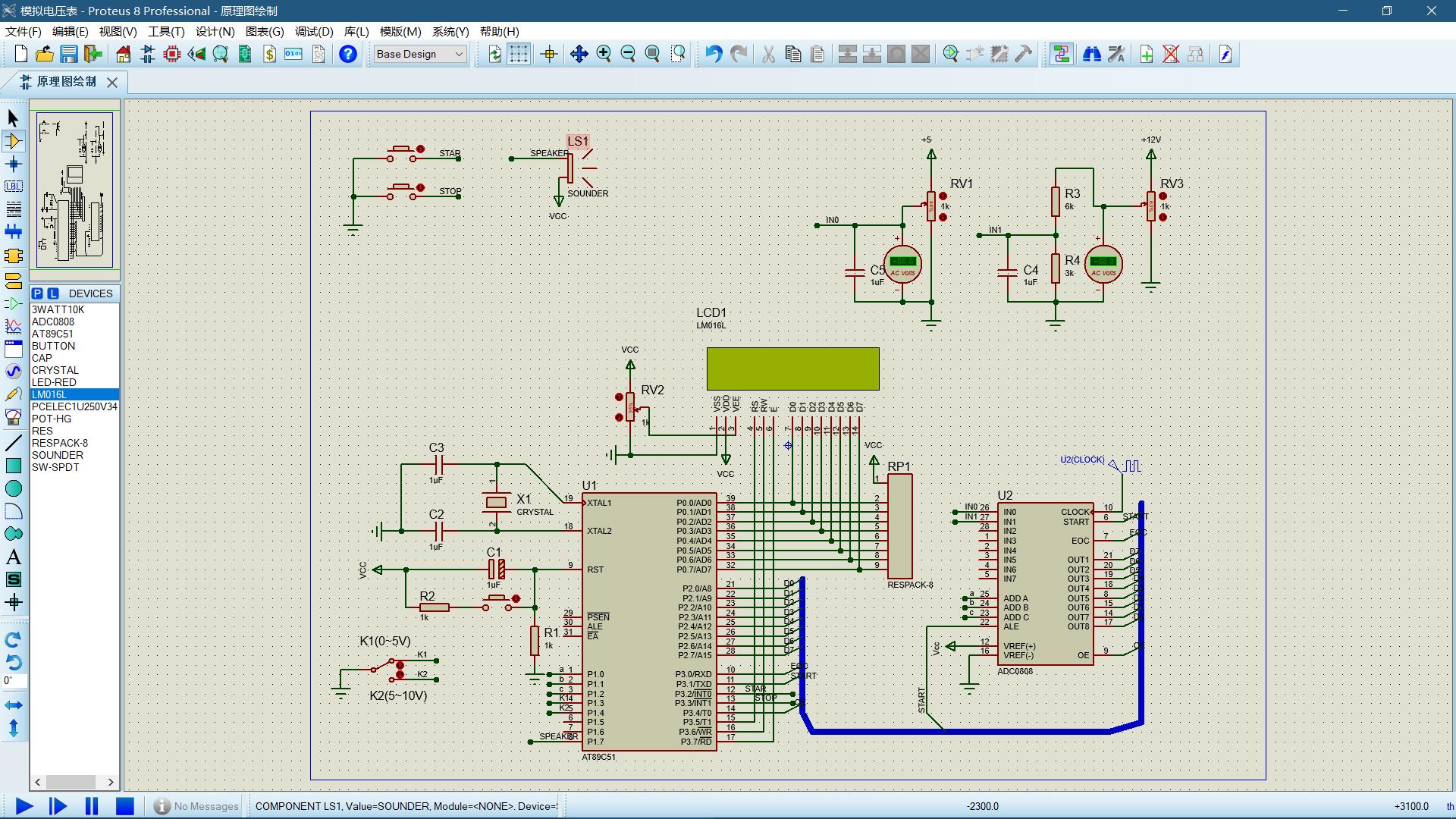
下麵是Protues的模擬原理圖:
5V時候的模擬:
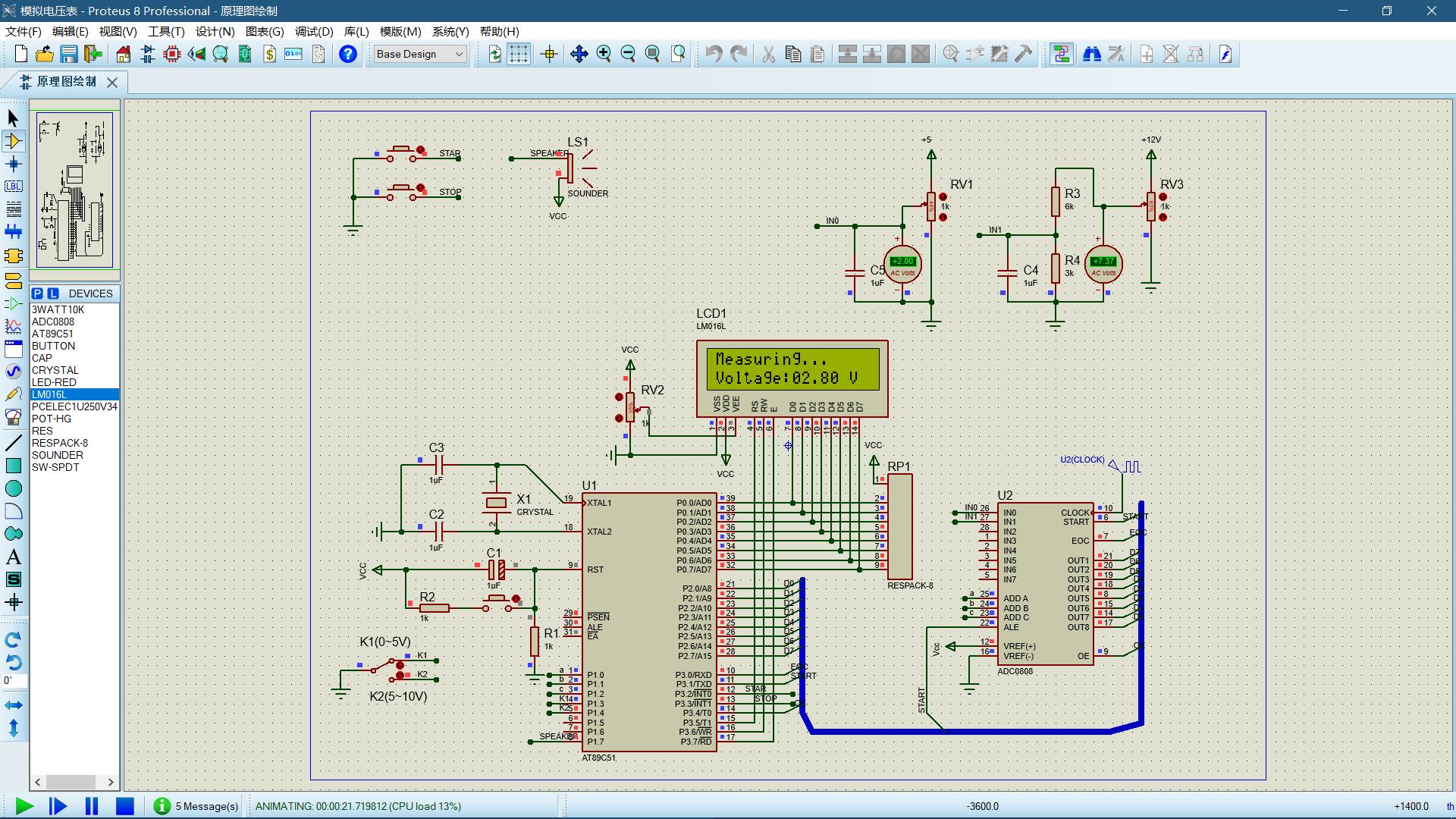
好啦,以上就是所有內容啦,祝大家學習愉快!!!


