
摘要 在我的想象中機器人首先應該能自由的走來走去,然後應該能流利的與主人對話。朝著這個理想,我準備設計一個能自由行走,並且可以與人語音對話的機器人。實現的關鍵是讓機器人能通過感測器感知周圍環境,並通過機器人大腦處理並輸出反饋和執行動作。本章節涉及到的感測器有激光雷達、IMU、輪式里程計、麥克風、音響 ...
摘要
在我的想象中機器人首先應該能自由的走來走去,然後應該能流利的與主人對話。朝著這個理想,我準備設計一個能自由行走,並且可以與人語音對話的機器人。實現的關鍵是讓機器人能通過感測器感知周圍環境,並通過機器人大腦處理並輸出反饋和執行動作。本章節涉及到的感測器有激光雷達、IMU、輪式里程計、麥克風、音響、攝像頭,和用於處理信息的嵌入式主板。關於感測器的ROS驅動程式開發和在機器人上的使用在後面的章節會展開,本章節重點對機器人感測器和嵌入式主板進行講解,主要內容:
1.ydlidar-x4激光雷達
在移動機器人中,獲取機器人周圍障礙物和環境的輪廓形狀是非常重要的。使用激光雷達正是為了實現這個目的。利用掃描得到的障礙物信息,機器人就可以利用SLAM建立地圖、併進行避障和自主導航。考慮到成本,推薦大家選用低成本的2D激光雷達,這裡推薦的ydlidar-x4激光雷達正是一款極低成本的2D激光雷達,作為學習性能足夠用了。
1.1.硬體概述

(圖1)ydlidar-x4激光雷達實物
雷達主體由激光測距模組和電機構成,雷達主體需要連接轉接板,用於實現外部供電和UART轉USB,如圖1。

(圖2)ydlidar-x4激光雷達性能參數
測距頻率是指每秒鐘測距的次數(即激光測距模組的採樣率),測距頻率預設為5KHz;掃描頻率是指電機每秒鐘轉過的圈數,掃描頻率預設為8Hz;測距範圍是指落在此距離範圍的障礙物才能被測量,測距範圍為0.12~10m;掃描角度為0~360度,也就是能夠360度全方位掃描;測距解析度就是測距精度;角度解析度就是兩個相鄰掃描點之間的夾角。ydlidar-x4激光雷達性能參數,如圖2。
關於激光雷達的性能參數對SLAM建圖與避障導航的影響,這裡做一個簡短的分析。
掃描頻率:
掃描頻率越高,電機轉動一圈的時間約短,掃描獲取1幀雷達數據的時間越短,這樣可以使SLAM建圖和避障導航實時性更好。簡單點說就是機器人運動速度很快時,掃描到的點雲數據連續性也比較好,這有利於SLAM演算法建立穩定的地圖,有利於避障導航演算法及時發現並避開障礙物。
測距範圍:
小於測距範圍最小值的區域就是雷達的測量盲區,處於盲區中的障礙物無法被探測,所以,盲區當然是越小越好以保證機器人不發生碰撞;大於測距範圍最大值的區域就是雷達超量程的區域,在超量程的區域的障礙物無法被探測或者可以探測但誤差很大,所以,在比較開闊的環境下應該採用遠距離量程的雷達。
掃描角度:
大部分雷達都是0~360度全方位掃描的,所以就沒什麼太大的區別了,其實就是機器人不用轉動身體的情況下就能一次性掃描出四周的障礙物信息。
測距解析度:
測距解析度也就是測距精度,測距精度越高當然有利於SLAM建圖和避障導航,但是測距精度越越高的雷達成本當然也越高,現在國產低成本的雷達普遍為釐米級(cm)的精度,差一點的雷達5cm左右的精度,稍微好一點的雷達2cm左右的精度,如果要達到毫米級(mm)的精度成本就非常高了。
角度解析度:
角度解析度決定了兩個相鄰點雲之間的夾角,由於雷達是通過旋轉進行掃描的,隨著距離增加點雲會越來越稀疏。如果角度解析度比較低,在掃描遠距離物理時只能得到非常稀疏的幾個點雲,這樣的點雲基本上沒有什麼用處了。
角度解析度 = 360 /(測距頻率 / 掃描頻率)
從上面的角度解析度計算公式來看,一般測距頻率為常數值(由激光模組特性決定),那麼通過降低掃描頻率可以提升角度解析度,但同時掃描頻率降低會影響雷達的實時性,所以這是一個權衡的過程,根據實際情況做選擇。
1.2.工作原理
激光雷達之所以流行,得益於它能夠精確的測距。主流的激光雷達基於兩種原理:一種是三角測距法,另一種是飛行時間(TOF)測距法。其實很好理解,就是利用了最基本的數學與物理知識。
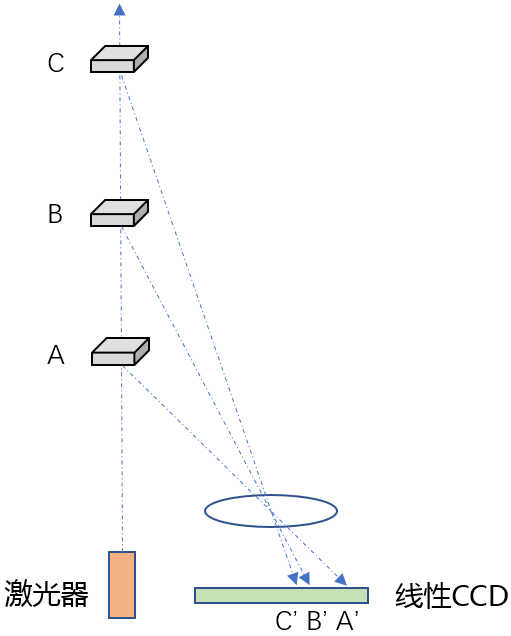
(圖3)三角測距原理
三角測距原理如圖3,激光器發射一束激光,被物體A反射後,照射到圖像感測器的A’,這樣就形成了一個三角形,通過解算可以求出物體A到激光器的距離。激光束被不同距離的物體反射後,形成不同的三角形。我們不難發現隨物體距離不斷變遠,反射激光在圖像感測器上的位置變化會越來越小,也就是越來越難以分辨。這正是三角測距的一大缺點,物體距離越遠,測距誤差越大。
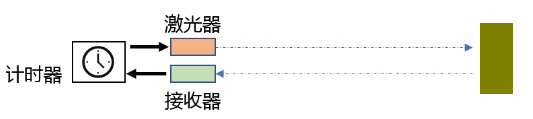
(圖4)TOF測距原理
飛行時間(TOF)測距原理如圖4,激光器發出激光時,計時器開始計時,接收器接收到反射回來的激光時,計時器停止計時,得到激光傳播的時間後,通過光速一定這個條件,很容易計算出激光器到障礙物的距離。由於光速傳播太快了,要獲取精確的傳播時間太難了。所以這種激光雷達自然而然成本也會高很多,但是測距精度很高。
1.3.在機器人中使用ydlidar-x4激光雷達

(圖5)在機器人中使用ydlidar-x4激光雷達
ydlidar-x4激光雷達通過串口與機器人相連接,機器人中通過運行雷達ROS驅動,來實現讀取串口的雷達數據和將雷達數據發佈到/scan這個主題,這樣機器人上的其它節點就可以通過訂閱/scan主題來獲取激光雷達數據了。關於雷達ROS驅動在機器人上的具體使用,將在後面的章節中具體講解。
後記
如果大家對博文的相關類容感興趣,或有什麼技術疑問,歡迎加入下麵的《SLAM+語音機器人DIY》QQ技術交流群,一起討論學習^_^



