
此篇文章深入淺出介紹了關於高速串列收發器的幾個重要概念和註意事項,為方便知識點複習總結和後續查閱特此轉載,原文標題及鏈接為:xilinx 高速收發器Serdes深入研究 - CSDN博客 https://blog.csdn.net/u010161493/article/details/7768802 ...
此篇文章深入淺出介紹了關於高速串列收發器的幾個重要概念和註意事項,為方便知識點複習總結和後續查閱特此轉載,原文標題及鏈接為:xilinx 高速收發器Serdes深入研究 - CSDN博客 https://blog.csdn.net/u010161493/article/details/77688024
一、為什麼要用Serdes
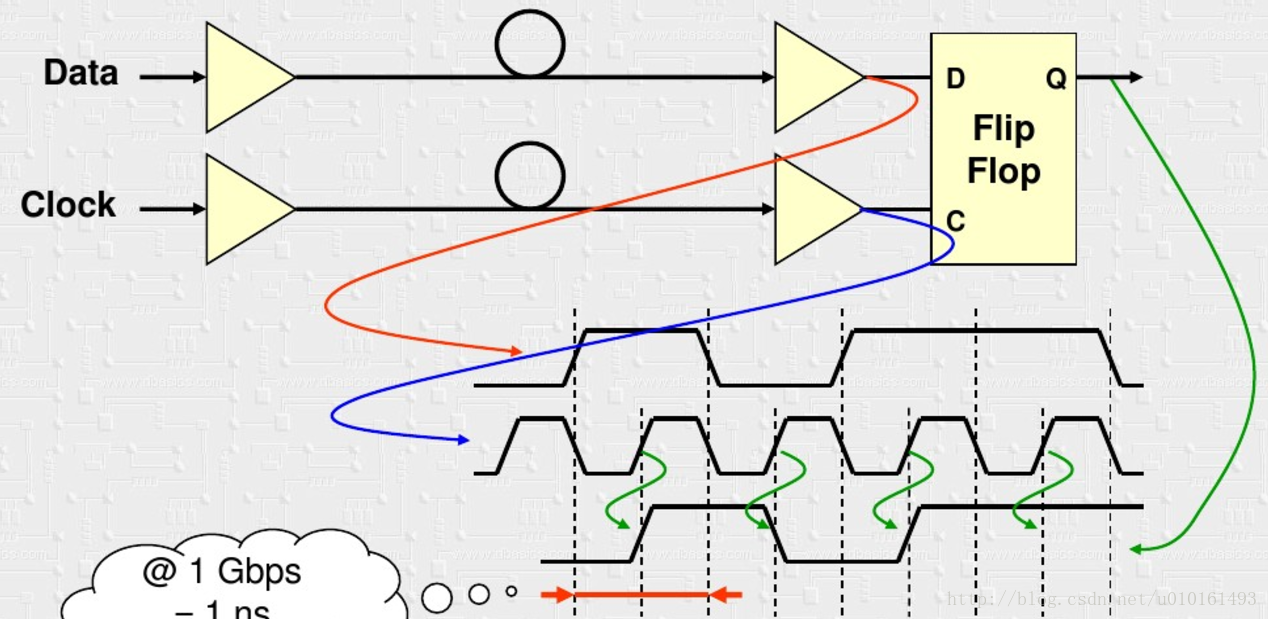
傳統的源同步傳輸,時鐘和數據分離。在速率比較低時(<1000M),沒有問題。
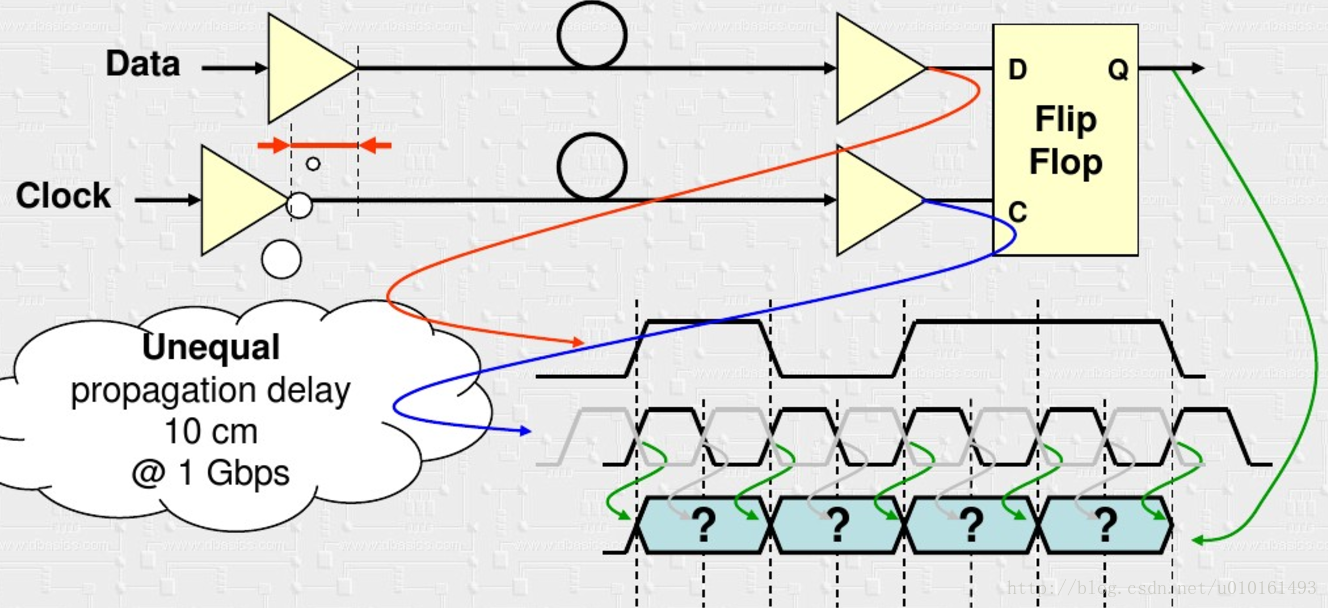
在速率越來越高時,這樣會有問題
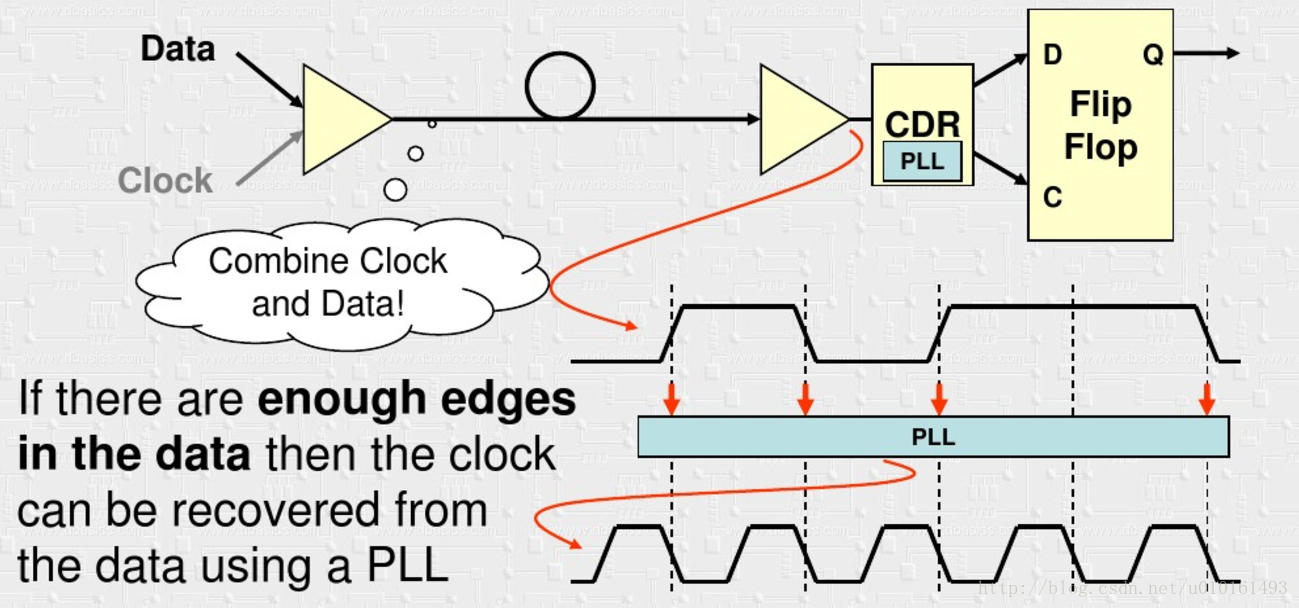
由於傳輸線的時延不一致和抖動存在,接收端不能正確的採樣數據,對不准眼圖中點。然後就想到了從數據裡面恢復出時鐘去採樣數據,即CDR
這樣就不存在延遲不一致的情況,有輕微的抖動也不會影響採樣(恢復的時鐘會隨著數據一起抖動)。
二 、為什麼要用8b10b,64b66b?
1 提供足夠的跳變來恢復時鐘
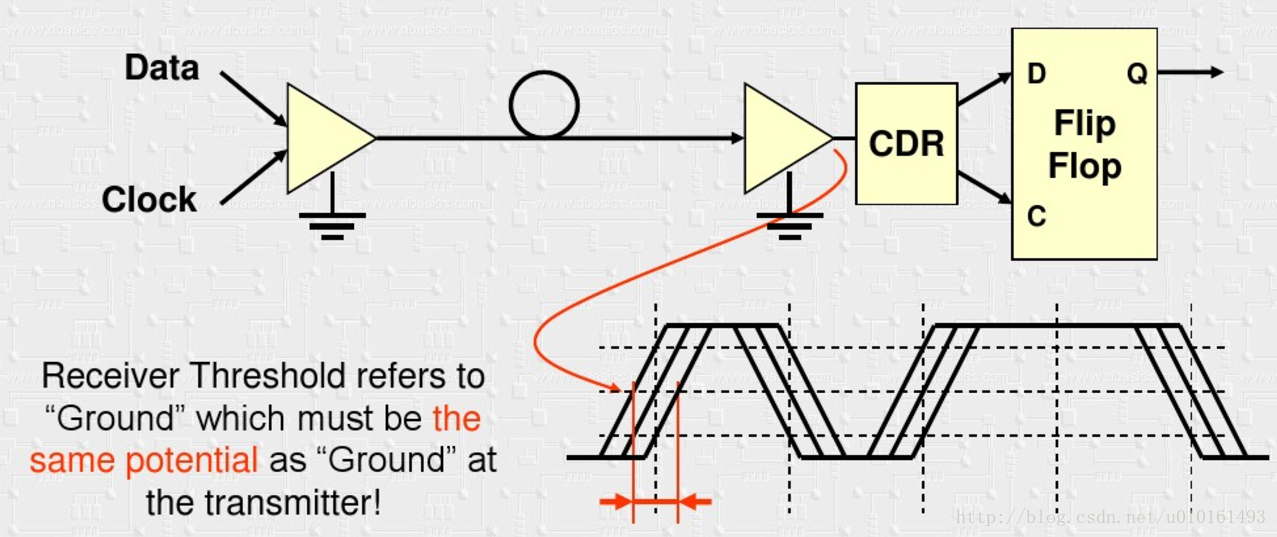
這樣還有問題,收發兩端必須共地,但往往很難實現。
於是採樣差分信號傳輸,為了防止共模電壓在接收端導致電流過大,使用電流驅動模式。看到接收端有電容進行交流耦合,隔直流。這樣又帶來一個問題,需要DC平衡。所以有了下麵另一個原因。
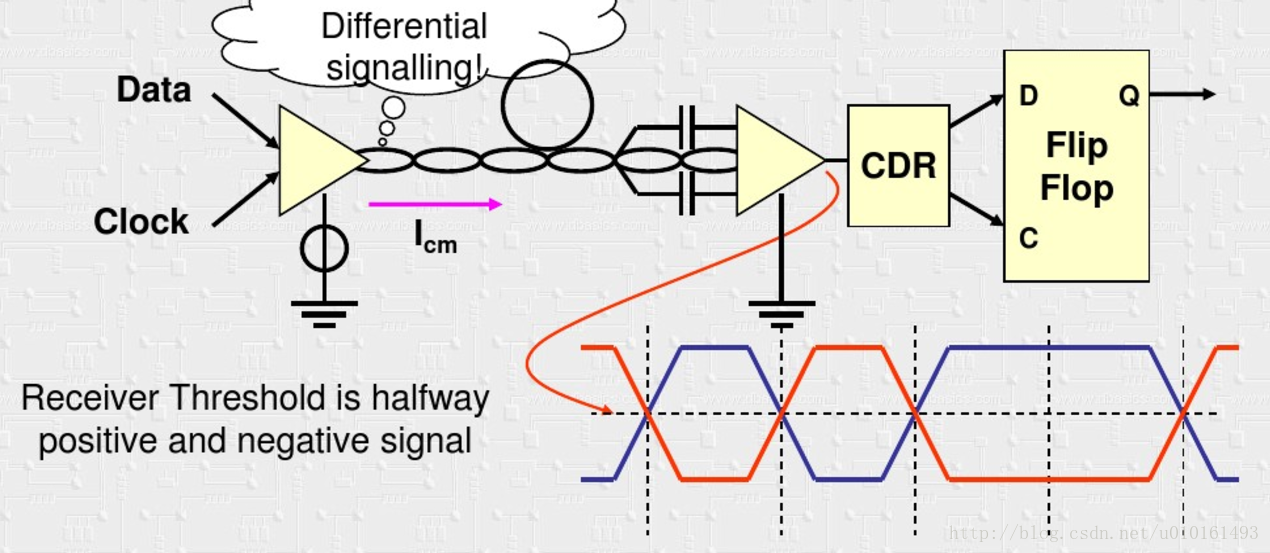
2 DC平衡,即0和1的數量要相等。
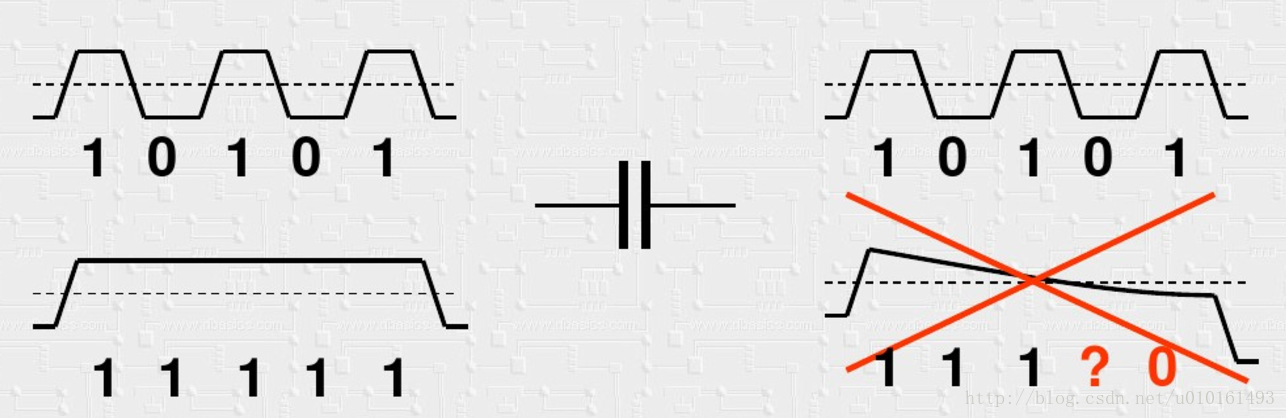
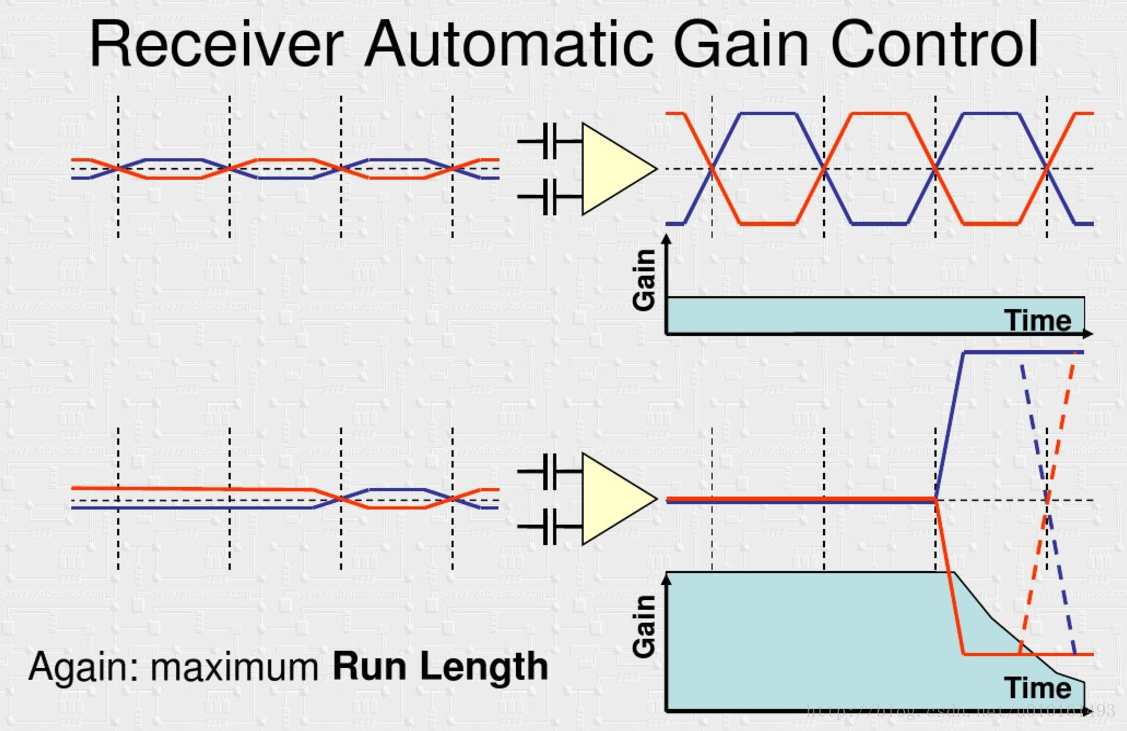
3 run length,0和1連續出現的最大長度
AGC自動增益控制需要交流分量才能實現放大
4 comma碼,K碼
在serdes上面的高速串列流在接收端需要重新串並轉化成多字並行,怎麼找到字的邊界進行對齊呢?這就需要一個特殊的序列,這就是comma碼。 傳輸過程中需要的一些控制,最好不要和數據衝突了,這就是K碼。基於以上四個原因,就有了8b10b,64b66b的出現。
三 、8b10b編碼
8b10b編碼一句話概括起來就是把8bit的數據變成10bit的數據,其中所有1或0的個數不會超過6個,並且連續的1或0的個數不會超過4個。這樣原本1024的漢明空間編碼後就大大減小了。其中有256個data碼和12K碼控制碼。這樣數據和控制碼不會重合。 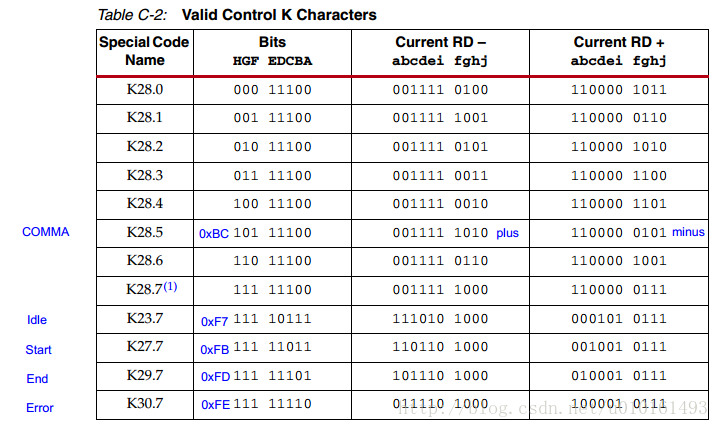
其中K28.1,K28.5,K28.7可以作為分隔碼,也叫comma碼,用於接收端在串列的數據流中找到位元組邊界。常用的K28.5即0xBC。因為正常傳輸的數據也可能有0xBC,怎麼區分呢?是有一根單獨的控制線,tx_is_K在傳輸K碼時拉高,在傳數據時拉低,去控制8b10b的編碼模塊到底是編碼成數據還是控制K碼。
四、Xilinx Serdes的幾個細節
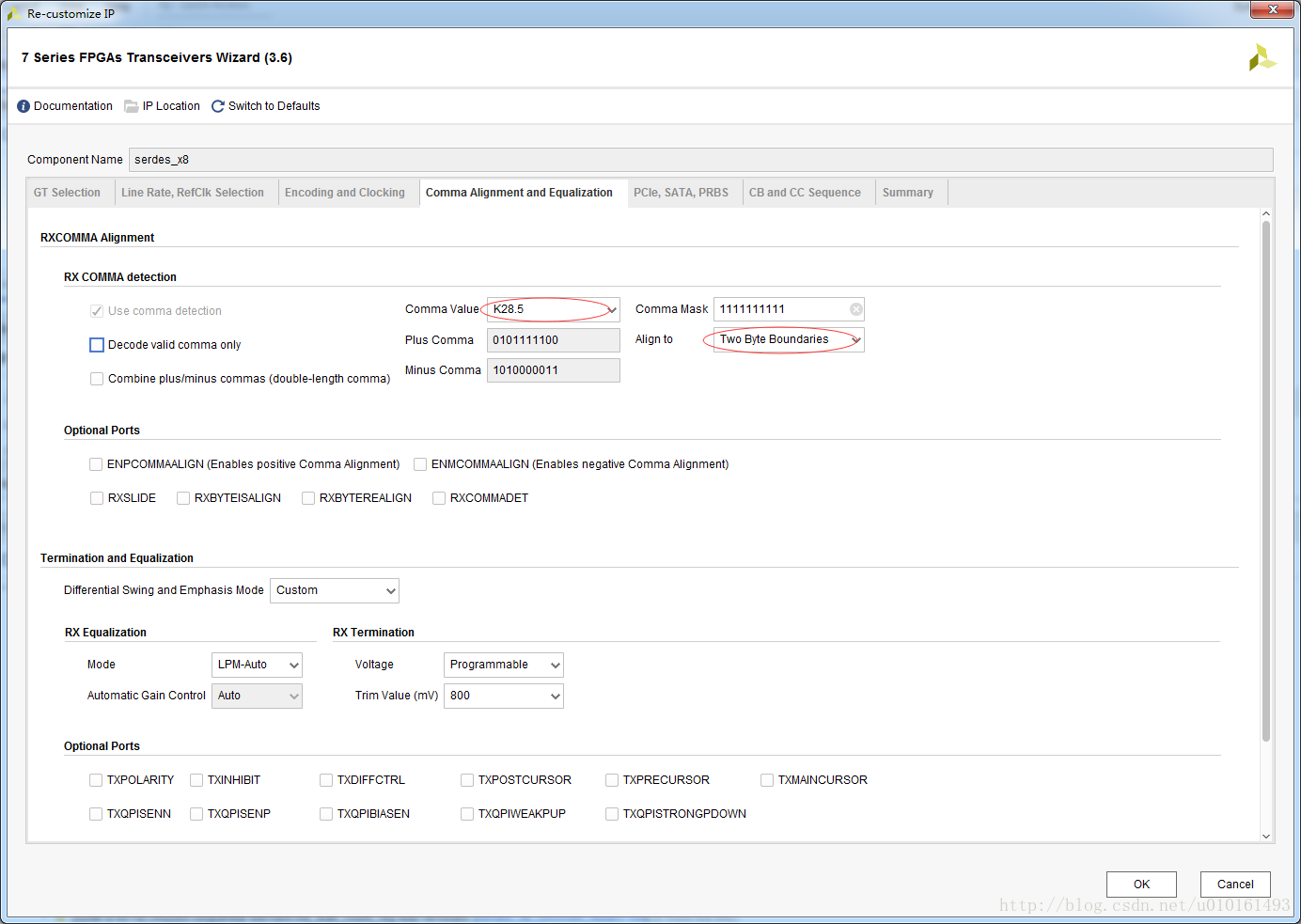
1.COMMA碼使用
K28.5,0xBC,+0101_111100,-1010_000011; 為檢測位元組分割。 使用其它K碼,作為幀開始,幀結束,時鐘修正和數據對齊。
2.多位元組處理
在數據率比較高的時候,外部位寬可能是2字(16位)或者4字(32位)。這是如果收發雙方不約定好在高低哪個字發送comma碼,這時是可以檢測字邊界,但接收端就會出現高低位元組翻轉的情況。在任意對於單COMMA的數據對齊,選擇偶數位元組對齊。發送的時候 0x5ABC->2’b01。
也可以選擇發送組合的comma碼,就是把NP的comma拼接起來發送,這樣接收端就檢測16bit的雙字邊界。也可以避免上面的情況出現。發送的時候0xBCBC->2’b11
註意:decode valid comma only不要選,因為還可能發送其他的K碼用於控制。反正8b10b是用的收發器硬核的資源,不用白不用。

3、環回設置:
1.“000”:正常模式
2.“001”:近端PCS環回
3.“010”:近端PMA環回
4.“100”:遠端PMA環回
5.“110”:遠端PCS環回
註意Xilinx例化的example的文件中配置的環回是預留環回介面的意思,仍然需要另外手動配置。
4、fsm_down狀態機
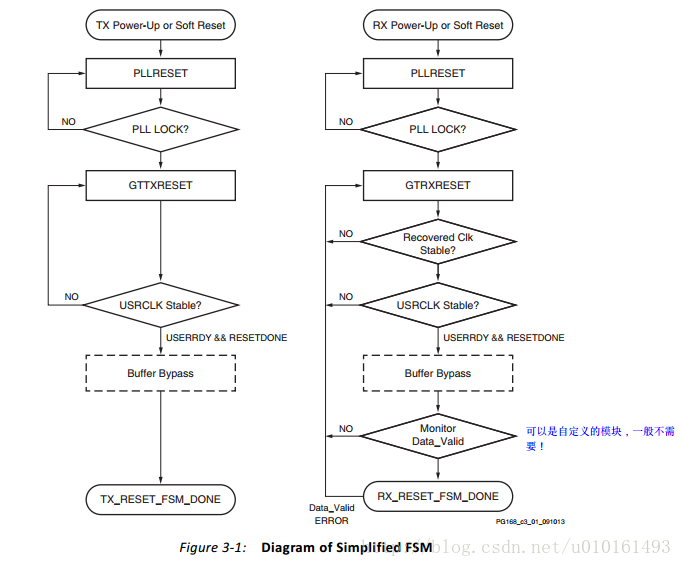
在Monitor Data_Valid模塊,是用的frame_check的正確的信號,校驗失敗會導致複位GTrxreset。可以不用這個反饋,直接置1。需要手動改一下。


