
1.編譯:將高級語言源代碼轉換成目標代碼(機器語言),程式便可運行。 好處:目標代碼執行速度更快;目標代碼在相同操作系統上使用靈活。 2.解釋:將高級語言源代碼逐條轉換成目標代碼同時逐條執行,每次運行程式需要源代碼和解釋器。 好處:便於維護源代碼;良好的跨平臺可移植性。 3.靜態語言:編譯執 ...
1.編譯:將高級語言源代碼轉換成目標代碼(機器語言),程式便可運行。
好處:目標代碼執行速度更快;目標代碼在相同操作系統上使用靈活。
2.解釋:將高級語言源代碼逐條轉換成目標代碼同時逐條執行,每次運行程式需要源代碼和解釋器。
好處:便於維護源代碼;良好的跨平臺可移植性。
3.靜態語言:編譯執行的編程語言,如C、Jave等。
4.腳本語言:解釋執行的編程語言,如PHP等。
5.python語言是腳本語言、通用語言、開源語言、跨平臺語言和多模型語言。
6.IPO模式:
I:Input 輸入,程式的輸入;
P:Process處理,程式的主要邏輯;
O:Output輸出,程式的輸出。
7.程式編寫的步驟:分析問題、確定問題(劃分IPO模塊)、設計演算法、編寫程式、調試程式、升級維護;
8.縮進: 1縮進 = 4個空格
作用:用以在python中表明代碼的層次關係
縮進是python語言中表明程式框架的唯一手段
9.python對函數庫引用的方式:
import <庫名>,例:import turtle (<庫名>.<函數名>)
from <庫名> import <函數名>,from <庫名> import *
練習1:求π的值。
1 from random import random 2 from math import sqrt 3 from time import clock 4 DARTS=1200 #拋灑點數 5 hits=0 #落在目標1/4圓域內的點數 6 clock() #計時函數 7 for i in range (1,DARTS): 8 x,y = random(),random() 9 dist = sqrt(x**2 + y**2) 10 if dist <=1.0: #表示點落在1/4圓域內 11 hits=hits+1 12 pi = 4 * (hits/DARTS) 13 print("Pi的值是%s" %pi) 14 print("程式運行時間是%-5.5ss"%clock())
應用蒙特卡洛方法求解π。蒙特卡洛方法又稱隨機抽樣或統計試驗方法去,是利用隨機試驗求解問題的方法。
練習2:將攝氏度轉換為華氏度。
1 val = input("請輸入帶溫度表示符號的溫度值(例如: 32C): ") 2 if val[-1] in ['C','c']: 3 f = 1.8 * float(val[0:-1]) + 32 4 print("轉換後的溫度為: %.2fF"%f) 5 elif val[-1] in ['F','f']: 6 c = (float(val[0:-1]) - 32) / 1.8 7 print("轉換後的溫度為: %.2fC"%c) 8 else: 9 print("輸入有誤")
練習3:繪製彩色螺旋線
1 import turtle 2 import time #調用庫函數 3 turtle.pensize(2) #設置畫筆的寬度 4 turtle.bgcolor("black") #設置背景顏色 5 colors = ["red","yellow","purple","blue"] #同時設置多個顏色 6 turtle.tracer(False) 7 for x in range(400): 8 turtle.forward(2*x) 9 turtle.color(colors[x % 4]) 10 turtle.left(91) #逆時針移動91° 11 turtle.tracer(True)
練習4:繪製太陽花
1 from turtle import * #調用庫函數 2 color("red",'yellow') #設置顏色 3 begin_fill() #準備開始填充圖形 4 while True: 5 forward(200) #向當前畫筆方向移動 200 像素長度 6 left(170) #逆時針移動170° 7 if abs(pos())<1: 8 break 9 end_fill() #填充完成 10 done() #程式中的最後一個語句
練習5:繪製螺旋線
1 import turtle 2 import time 3 turtle.speed("fastest") #設置畫筆移動速度,畫筆繪製的速度範圍[0,10]整數,數字越大越快。 4 turtle.pensize(2) #設置畫筆的寬度 5 turtle.pencolor("blue") #沒有參數傳入,返回當前畫筆顏色,傳入參數設置畫筆顏色 6 for x in range(100): 7 turtle.forward(2 * x) #向當前畫筆方向移動 2 * x 像素長度 8 turtle.left(90) #逆時針移動90° 9 time.sleep(3) #線程推遲指定的時間運行,單位為秒。
練習6:繪製紅色五角星
1 from turtle import * 2 fillcolor("red") 3 begin_fill() 4 while True: 5 forward(200) 6 right(144) 7 if abs(pos())<1: 8 break 9 end_fill()
練習7:蟒蛇繪製程式。
1 import turtle 2 3 def drawSnake(rad,angle,len,neckrad): #rad描述圓形軌跡半徑的位置,angle表示小烏龜沿著圓形爬行的弧度制 4 for i in range(len): 5 turtle.circle(rad,angle) #讓小烏龜沿著一個圓形爬行 6 turtle.circle(-rad,angle) 7 turtle.circle(rad,angle/2) 8 turtle.fd(rad) #表示小烏龜向前沿直線爬行移動,參數表示爬行的距離 9 turtle.circle(neckrad+1,180) 10 turtle.fd(rad*2/3) 11 12 def main(): 13 turtle.setup(1300,800,0,0) #該函數用於啟動一個圖形視窗 14 #參數:啟動視窗寬度為1300像素、高度為800,(0,0)表示視窗左上角在屏幕中的坐標位置 15 pythonsize = 30 16 turtle.pensize(pythonsize) #運動軌跡的寬度 17 turtle.pencolor("blue") #運動軌跡的顏色 18 turtle.seth(-40) #啟動時運動的方向,負值表示相反方向;表示向東南方向40度 19 drawSnake(40,80,5,pythonsize/2) 20 21 main() #main()函數給出了軌跡窗體的大小,爬行軌跡的顏色和寬度以及初始爬行方位
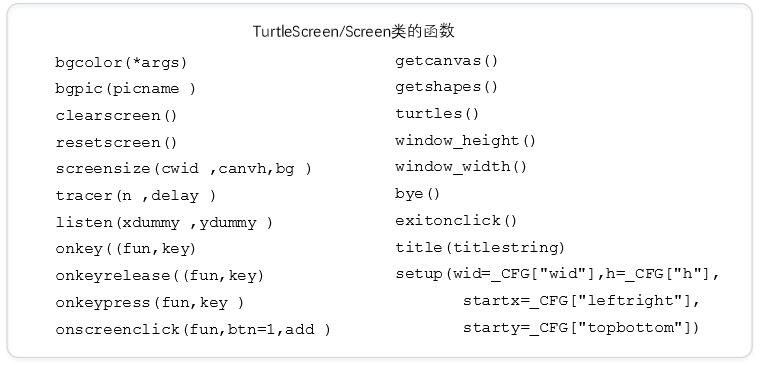
turtle庫

Turtle Screen/Screen類的函數
在Python中,通常有這幾種方式來表示時間:1)時間戳 2)格式化的時間字元串 3)元組(struct_time)共九個元素。由於Python的time模塊實現主要調用C庫,所以各個平臺可能有所不同。
下麵我們介紹time模塊中常用的幾個函數:
1)time.localtime([secs]):將一個時間戳轉換為當前時區的struct_time。secs參數未提供,則以當前時間為準。
2)time.gmtime([secs]):和localtime()方法類似,gmtime()方法是將一個時間轉換為UTC時區(0時區)的struct_time
3)time.time():返回當前時間的時間。
4)time.mktime(t):將一個struct_time轉化為時間。
5)time.sleep(secs):線程推遲指定的時間運行。單位為秒。
6)time.clock():這個需要註意,在不同的系統上含義不同。在UNIX系統上,它返回的是“進程時間”,它是用秒錶示的浮點數(時間戳)。而在WINDOWS中,第一次調用,返回的是進程運行的實際時間。而第二次之後的調用是自第一次調用以後到現在的運行時間。(實際上是以WIN32上QueryPerformanceCounter()為基礎,它比毫秒錶示更為精確)
7)time.asctime([t]):把一個表示時間的元組或者struct_time表示為這種形式:'Sun Jun 20 23:21:05 1993'。如果沒有參數,將會將time.localtime()作為參數傳入。
8)time.ctime([secs]):把一個時間(按秒計算的浮點數)轉化為time.asctime()的形式。如果參數未給或者為None的時候,將會預設time.time()為參數。它的作用相當於time.asctime(time.localtime(secs))。
9)time.strftime(format[, t]):把一個代表時間的元組或者struct_time(如由time.localtime()和time.gmtime()返回)轉化為格式化的時間字元串。如果t未指定,將傳入time.localtime()。如果元組中任何一個元素越界,ValueError的錯誤將會被拋出。
10)time.strptime(string[, format]):把一個格式化時間字元串轉化為struct_time。實際上它和strftime()是逆操作。


