
MATLAB粒子群優化演算法(PSO) 作者:凱魯嘎吉 - 博客園 http://www.cnblogs.com/kailugaji/ 一、介紹 粒子群優化演算法(Particle Swarm Optimization Algorithm)是一種群智能演算法,為了尋求全局最優。群體迭代,粒子在解空間追隨最 ...
MATLAB粒子群優化演算法(PSO)
作者:凱魯嘎吉 - 博客園 http://www.cnblogs.com/kailugaji/
一、介紹
- 粒子群優化演算法(Particle Swarm Optimization Algorithm)是一種群智能演算法,為了尋求全局最優。群體迭代,粒子在解空間追隨最優的粒子進行搜索。
- 粒子群演算法的思想源於對鳥群捕食行為的研究,模擬鳥集群飛行覓食的行為,鳥之間通過集體的協作使群體達到最優目的,是一種基於Swarm Intelligence的優化方法。
- 馬良教授在他的著作《蟻群優化演算法》一書的前言中寫到:“自然界的蟻群、鳥群、魚群、羊群、牛群、蜂群等,其實時時刻刻都在給予我們以某種啟示,只不過我們常常忽略了大自然對我們的最大恩賜!”
- 設想這樣一個場景:一群鳥在隨機搜索食物,已知
- (1)在這塊區域里只有一塊食物; (2)所有的鳥都不知道食物在哪裡; (3)但它們能感受到當前的位置離食物還有多遠.
- 那麼:找到食物的最優策略是什麼呢?
- 搜尋目前離食物最近的鳥的周圍區域,根據自己飛行的經驗判斷食物的所在。

- PSO的基礎: 信息的社會共用
二、演算法思路
- 每個尋優的問題解都被想像成一隻鳥,稱為“粒子”。所有粒子都在一個D維空間進行搜索。
- 所有的粒子都由一個fitness function 確定適應值以判斷目前的位置好壞。
- 每一個粒子必須賦予記憶功能,能記住所搜尋到的最佳位置。
- 每一個粒子還有一個速度以決定飛行的距離和方向。這個速度根據它本身的飛行經驗以及同伴的飛行經驗進行動態調整。
三、演算法流程與偽代碼


- c1: weight of local information
- c2: weight of global information
- p: particle's position
- v: path direction
- rand: random variable, 0<rand<1
- number of particles: 10~50
- c1+c2=4
- v=v+c1*rand*(pbest-p)+c2*rand*(gbest-p);中右邊第一項v: inertia, c1*rand*(pbest-p): personal influence, c2*rand*(gbest-p): social influence.
四、MATLAB程式
粒子群優化演算法求解函數y=x+x*sin(x)在[-10, 10]的最大值.
pso.m
function [best_x, best_y]=pso()
%find the max value of a function
%Author: kailugaji https://www.cnblogs.com/kailugaji/
posMax=10;posMin=-10; %range of feasible solution
x=posMin:0.1:posMax;
y=my_fun(x); %object function
plot(x,y);hold on; %plot function
popsize=30; %number of particles
max_iter=100; %maximum number of iterations
position=rand(popsize,1);
position=position*20-ones(popsize,1)*10; %particle's position
vMax=1;vMin=-1; %range of velocity
velosity=2*rand(popsize,1)-1; %path direction
pbest=position; %current optimum
gbest=position(1); %global optimum
wBegin=1;wEnd=0.05;
c1=2; %weight of local information
c2=2; %weight of global information
for i=1:max_iter
position_new=position+velosity; %change direction of each particle
velosity_new=(wEnd+(wBegin-wEnd)*(100-i)/100).*velosity+c1*rand().*(position-pbest.*ones(popsize,1))+c2*rand().*(position-gbest.*ones(popsize,1)); %inertia+personal influence+social influence
for j=1:popsize
if(position_new(j)>posMax)
position_new(j)=posMax;
end
if(position_new(j)<posMin)
position_new(j)=posMin;
end
if(velosity_new(j)>vMax)
velosity_new(j)=vMax;
end
if(velosity_new(j)<vMin)
velosity_new(j)=vMin;
end
if(my_fun(position_new(j))>my_fun(pbest(j)))
pbest(j)=position_new(j);
end
if(my_fun(position_new(j))>my_fun(gbest))
gbest=position_new(j);
end
end
position=position_new;
velosity=velosity_new;
end
plot(gbest,my_fun(gbest),'or');
best_x=gbest;
best_y=my_fun(gbest);
my_fun.m
function y=my_fun(x) y=x+x.*sin(x);
五、實驗結果
>> [best_x, best_y]=pso()
best_x =
8.0051
best_y =
15.9190
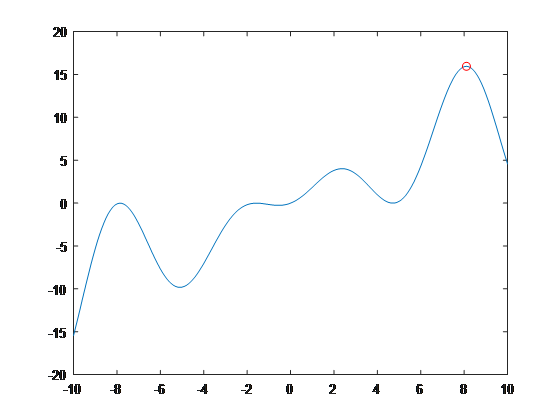
當x=8.0051時,粒子群優化演算法終止迭代,此時獲得的最大值為y=15.9190。


