如圖: 假設為三維空間有一個向量R 滿足關係: 即為加速度計的x軸,y軸,z軸。 對於MPU6050 其求出的數值為: 分母為靈敏度, ADCRx為讀出值。 我關心的是Axr,Ayr,Azr即 Rx Ry Rz與X,Y,Z軸的夾角 則: Axr = arccos() eg. 當MPU6050模塊水平 ...

如圖:
假設為三維空間有一個向量R 滿足關係:
即為加速度計的x軸,y軸,z軸。
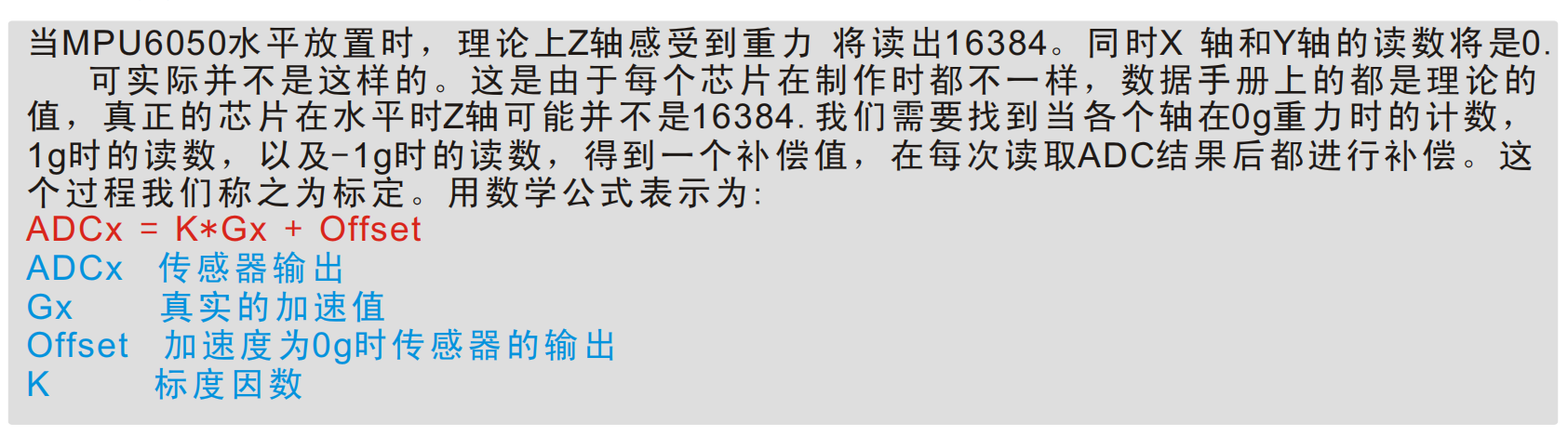
對於MPU6050 其求出的數值為:
分母為靈敏度, ADCRx為讀出值。
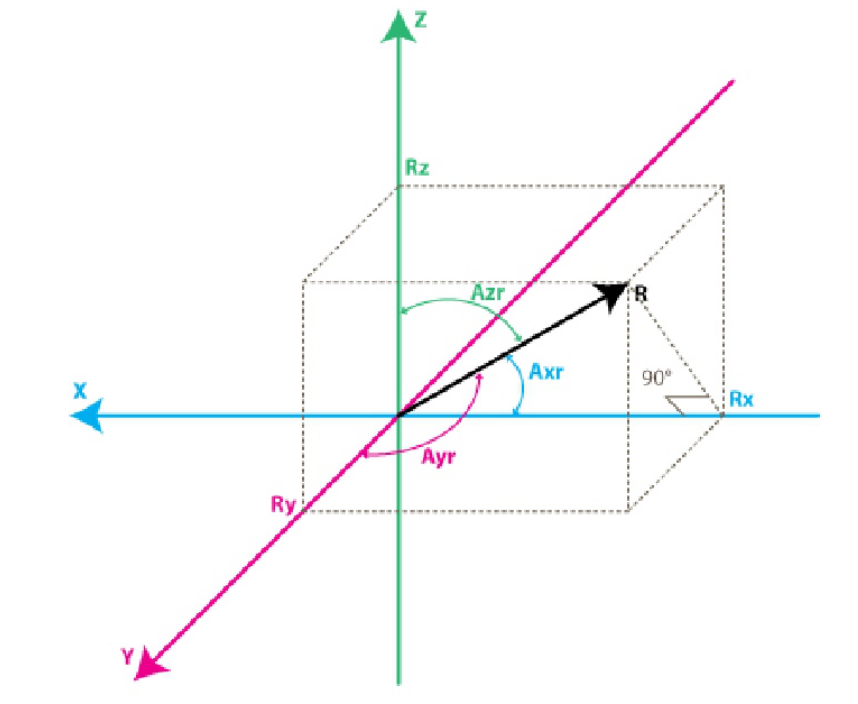
我關心的是Axr,Ayr,Azr即 Rx Ry Rz與X,Y,Z軸的夾角
則:
Axr = arccos()
eg. 當MPU6050模塊水平放置時, 假設無誤差, 則此時z軸受到重力 Rz = 1g, Rx =0,Ry = 0;
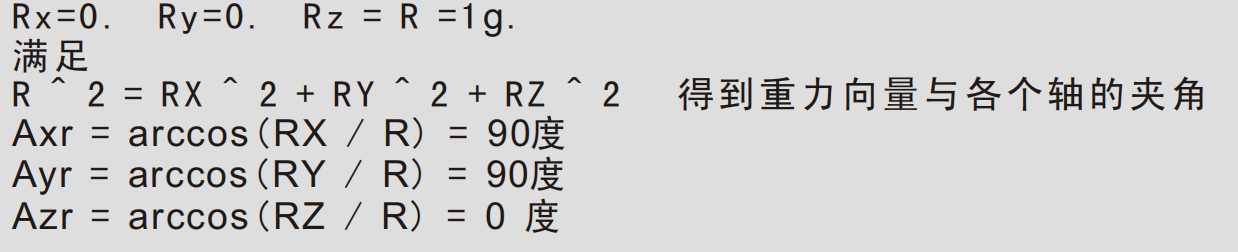
然而實際使用水平放置時並不理想。