
本節總結: uboot啟動流程如下: 1)設置CPU為管理模式 2)關看門狗 3)關中斷 4)設置時鐘頻率 5)關mmu,初始化各個bank 6)進入board_init_f()函數 (初始化定時器,GPIO,串口等,劃分記憶體區域) 7)重定位 複製uboot,然後修改SDRAM上的uboot鏈接地 ...
本節總結:
uboot啟動流程如下:
- 1)設置CPU為管理模式
- 2)關看門狗
- 3)關中斷
- 4)設置時鐘頻率
- 5)關mmu,初始化各個bank
- 6)進入board_init_f()函數 (初始化定時器,GPIO,串口等,劃分記憶體區域)
- 7)重定位 複製uboot,然後修改SDRAM上的uboot鏈接地址)
- 8)清bss
- 9)跳轉到board_init_r()函數,啟動流程結束
1.首先來安裝arm-linux-gcc-4.3.2交叉編譯器
mkdir arm-linux-gcc-4.3.2 //創建目錄 tar -xjf arm-linux-gcc-4.3.2.tar.bz2 -C arm-linux-gcc-4.3.2/ //解壓到arm-linux-gcc-4.3.2目錄下
然後添加環境變數:
有兩種方法,第一種只是臨時修改,重啟虛擬機便會複位:
export PATH=/arm-linux-gcc-4.3.2/usr/local/arm/4.3.2/bin:/usr/sbin:/usr/bin... ... //將arm-linux-gcc-4.3.2添加到環境變數
第二種,重啟不複位:
vi /etc/environment 添加: PATH=/arm-linux-gcc-4.3.2/usr/local/arm/4.3.2/bin:/usr/sbin:/usr/bin... ... //將arm-linux-gcc-4.3.2添加到環境變數
2.然後進入ftp://ftp.denx.de/pub/u-boot/來下載u-boot-2012.04.01
2.1.創建source insight工程,來看代碼
1)在board 目錄下只添加:
board/samsung/smdk2410/ // (2410單板文件)
2)在arch 目錄下只添加:
arch/arm/cpu/arm920t/ //(只添加這個目錄下的*.c,*.S公用文件) arch/arm/cpu/arm920t/s3c24x0/ //(24x0架構所有文件) arch/arm/include/asm/ //(只添加這個目錄下的*.h公用頭文件) arch/arm/include/asm/proc-armv/ //(arm架構的文件) arch/arm/include/asm/arch-s3c24x0/ //(24x0架構頭文件) arch/arm/lib/ //(與arm相關的庫文件)
3)在include/configs目錄下只添加:
include/configs/smdk2410.h // (用來配置2410單板的頭文件)
2.2編譯燒寫:
tar xjf u-boot-2012.04.01.tar.bz2 cd u-boot-2012.04.01 //進入解壓後文件目錄 make smdk2410_config //由於該uboot不支持2440板卡,所以只有配置2410板卡 make //編譯,生成u-boot.bin
3.最後燒寫u-boot.bin,發現無法啟動,接下來便來分析uboot的啟動流程
4.首先查看arch/arm/cpu/u-boot.lds鏈接腳本
如下圖所示,看到uboot最開始會進入_start:
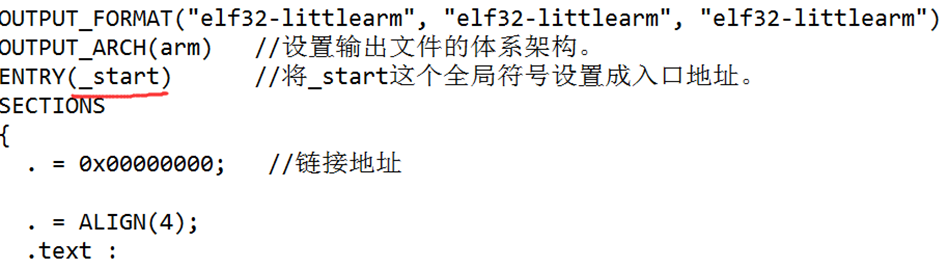
5. _start位於arch/arm/cpu/arm920t/start.S
所以,我們從start.S開始分析uboot啟動流程:
.globl _start //聲明_start全局符號,這個符號會被lds鏈接腳本用到 _start: b start_code //跳轉到start_code符號處,0x00 ldr pc, _undefined_instruction //0x04 ldr pc, _software_interrupt //0x08 ldr pc, _prefetch_abort //0x0c ldr pc, _data_abort //0x10 ldr pc, _not_used //0x14 ldr pc, _irq //0x18 ldr pc, _fiq //0x20 _undefined_instruction: .word undefined_instruction //定義_undefined_instruction指向undefined_instruction(32位地址) _software_interrupt: .word software_interrupt _prefetch_abort: .word prefetch_abort _data_abort: .word data_abort _not_used: .word not_used _irq: .word irq _fiq: .word fiq .balignl 16,0xdeadbeef //balignl使用,參考http://www.cnblogs.com/lifexy/p/7171507.html
其中符號保存的地址都在頂層目錄/system.map中列出來了
6. 從上面看到, _start會跳轉到start_code處
start_code: /*設置CPSR寄存器,讓CPU進入管理模式*/ mrs r0, cpsr //讀出cpsr的值 bic r0, r0, #0x1f //清位 orr r0, r0, #0xd3 //位或 msr cpsr, r0 //寫入cpsr #if defined(CONFIG_AT91RM9200DK) || defined(CONFIG_AT91RM9200EK) /* * relocate exception table */ ldr r0, =_start ldr r1, =0x0 //r1等於異常向量基地址 mov r2, #16 copyex: subs r2, r2, #1 //減16次,s表示每次減都要更新條件標誌位 ldr r3, [r0], #4 str r3, [r1], #4 //將_start標號後的16個符號存到異常向量基地址0x0~0x3c處 bne copyex //直到r2減為0 #endif #ifdef CONFIG_S3C24X0 /* 關看門狗*/ # define pWTCON 0x53000000 # define INTMSK 0x4A000008 /* Interrupt-Controller base addresses */ # define INTSUBMSK 0x4A00001C # define CLKDIVN 0x4C000014 /* clock divisor register */ ldr r0, =pWTCON mov r1, #0x0 str r1, [r0] //關看門狗,使WTCON寄存器=0 /*關中斷*/ mov r1, #0xffffffff ldr r0, =INTMSK str r1, [r0] //關閉所有中斷 # if defined(CONFIG_S3C2410) ldr r1, =0x3ff ldr r0, =INTSUBMSK str r1, [r0] //關閉次級所有中斷 # endif /* 設置時鐘頻率, FCLK:HCLK:PCLK = 1:2:4 ,而FCLK預設為120Mhz*/ ldr r0, =CLKDIVN mov r1, #3 str r1, [r0] #ifndef CONFIG_SKIP_LOWLEVEL_INIT bl cpu_init_crit //關閉mmu,並初始化各個bank #endif call_board_init_f: ldr sp, =(CONFIG_SYS_INIT_SP_ADDR) //CONFIG_SYS_INIT_SP_ADDR=0x30000f80 bic sp, sp, #7 //sp=0x30000f80 ldr r0,=0x00000000 bl board_init_f
上面的CONFIG_SYS_INIT_SP_ADDR =0x30000f80,是通過arm-linux-objdump -D u-boot>u-boot.dis生成反彙編,然後從u-boot.dis得到的,如下圖所示:

7.然後進入第一個C函數:board_init_f()
該函數主要工作是:
清空gd指向的結構體、通過init_sequence函數數組,來初始化各個函數以及逐步填充結構體,最後劃分記憶體區域,然後調用relocate_code()對uboot重定位
1)具體代碼如下所示:
void board_init_f(ulong bootflag) // bootflag=0x00000000 { bd_t *bd; init_fnc_t **init_fnc_ptr; //函數指針 gd_t *id; ulong addr, addr_sp; #ifdef CONFIG_PRAM ulong reg; #endif bootstage_mark_name(BOOTSTAGE_ID_START_UBOOT_F, "board_init_f"); /* Pointer is writable since we allocated a register for it */ gd = (gd_t *) ((CONFIG_SYS_INIT_SP_ADDR) & ~0x07);
其中gd是一個全局變數,用來傳遞給內核的參數用的,如下圖所示,在arch/arn/include/asm/global_data.h中定義,*gd指向r8寄存器,所以r8專門提供給gd使用

而CONFIG_SYS_INIT_SP_ADDR,在6節里得到=0x30000f80,所以gd=0x30000f80
2)繼續來看board_init_f():
__asm__ __volatile__("": : :"memory"); //memory:讓cpu重新讀取記憶體的數據 memset((void *)gd, 0, sizeof(gd_t)); //將0x30000f80地址上的gd_t結構體清0 gd->mon_len = _bss_end_ofs; // _bss_end_ofs =__bss_end__ - _start,在反彙編找到等於0xae4e0,所以mon_len等於uboot的數據長度 gd->fdt_blob = (void *)getenv_ulong("fdtcontroladdr", 16, (uintptr_t)gd->fdt_blob); for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) //調用init_sequence[]數組裡的各個函數 { if ((*init_fnc_ptr)() != 0) //執行函數,若函數執行出錯,則進入hang() {
hang (); //列印錯誤信息,然後一直while } }
上面的init_sequence[]數組裡存了各個函數,比如有:
- board_early_init_f():設置系統時鐘,設置各個GPIO引腳
- timer_init():初始化定時器
- env_init():設置gd的成員變數
- init_baudrate():設置波特率
- dram_init():設置gd->ram_size= 0x04000000(64MB)
3)繼續來看board_init_f():
addr = CONFIG_SYS_SDRAM_BASE + gd->ram_size; // addr=0x34000000 // CONFIG_SYS_SDRAM_BASE: SDRAM基地址,為0X30000000 // gd->ram_size: 等於0x04000000 #if !(defined(CONFIG_SYS_ICACHE_OFF) && defined(CONFIG_SYS_DCACHE_OFF)) /* reserve TLB table */ addr -= (4096 * 4); //addr=33FFC000 addr &= ~(0x10000 - 1); // addr=33FF0000, gd->tlb_addr = addr; //將64kB分配給TLB,所以TLB地址為33FF0000~33FFFFFF #endif /* round down to next 4 kB limit */ addr &= ~(4096 - 1); //4kb對齊, addr=33FF0000 debug("Top of RAM usable for U-Boot at: %08lx\n", addr);
/* * reserve memory for U-Boot code, data & bss * round down to next 4 kB limit */ addr -= gd->mon_len; // 在前面分析過gd->mon_len=0xae4e0, //所以addr=33FF0000 -0xae4e0=33F41B20, addr &= ~(4096 - 1); //4095=0xfff,4kb對齊, addr=33F41000 //所以分配給uboot各個段的重定位地址為33F41000~33FFFFFF debug("Reserving %ldk for U-Boot at: %08lx\n", gd->mon_len >> 10, addr); #ifndef CONFIG_SPL_BUILD addr_sp = addr - TOTAL_MALLOC_LEN; //分配一段malloc空間給addr_sp //TOTAL_MALLOC_LEN=1024*1024*4,所以malloc空間為33BF1000~33F40FFF addr_sp -= sizeof (bd_t); //分配一段bd_t結構體大的空間 bd = (bd_t *) addr_sp; //bd指向剛剛分配出來的bd_t結構體 gd->bd = bd; // 0x30000f80處的gd變數的成員bd等於bd_t基地址 addr_sp -= sizeof (gd_t); //分配一個gd_t結構體大的空間 id = (gd_t *) addr_sp; //id指向剛剛分配的gd_t結構體 gd->irq_sp = addr_sp; //0x30000f80處的gd變數的成員irq_sp等於gd_t基地址
addr_sp -= 12; addr_sp &= ~0x07; ... ... relocate_code(addr_sp, id, addr); //進入relocate_code()函數,重定位代碼,以及各個符號 // addr_sp: 棧頂,該棧頂向上的位置用來存放gd->irq_sp、id 、gd->bd、malloc、uboot、TLB(64kb), //id: 存放 gd_t結構體的首地址 // addr: 等於存放uboot重定位地址33F41000 }
執行完board_init_f()後,最終記憶體會劃分如下圖所示:
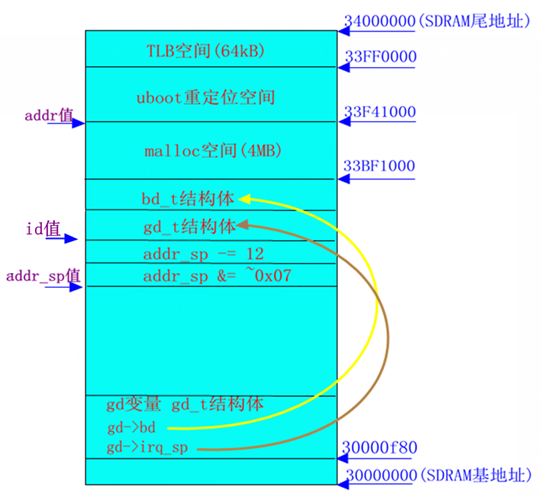
其實此時uboot還在flash中運行,然後會進入start.S的relocate_code()里進行uboot重定位
8.接下來進入重定位
1)start.S的relocate_code()代碼如下所示
relocate_code: mov r4, r0 /* save addr_sp */ // addr_sp棧頂值 mov r5, r1 /* save addr of gd */ // id值 mov r6, r2 /* save addr of destination */ // addr值:uboot重定位地址 /* Set up the stack */ stack_setup: mov sp, r4 //設置棧addr_sp adr r0, _start //在頂層目錄下system.map符號文件中找到_start =0,所以r0=0 cmp r0, r6 //判斷_start(uboot重定位之前的地址)和addr(重定位地址)是否一樣 beq clear_bss /* skip relocation */
mov r1, r6 /* r1 <- scratch for copy_loop */ //r1= addr(重定位地址) ldr r3, _bss_start_ofs //_bss_start_ofs=__bss_start - _start(uboot代碼大小) add r2, r0, r3 /* r2 <- source end address*/ //r2= uboot重定位之前的結束地址 copy_loop: ldmia r0!, {r9-r10} /* copy from source address [r0] */ //將r0處的兩個32位數據拷到r9-r10中,然後r0+=8 stmia r1!, {r9-r10} /* copy to target address [r1]*/ //將拷出來的兩個數據放入r1(重定位地址)處,然後r1+=8 cmp r0, r2 /* until source end address [r2]*/ //判斷拷貝的數據是否到結束地址 blo copy_loop
上面只是把代碼複製到SDRAM上,而鏈接地址內容卻沒有改變,比如異常向量0x04的代碼內容還是0x1e0,
我們以異常向量0x04為例,來看它的反彙編:
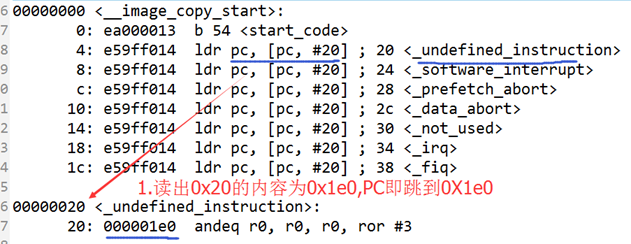
如上圖所示,即使uboot在SDRAM運行,由於代碼沒修改,PC也會跳到0x1e0(flash地址)上
和之前老的uboot有很大區別,以前老的uboot直接是使用的SDRAM鏈接地址,如下圖所示:
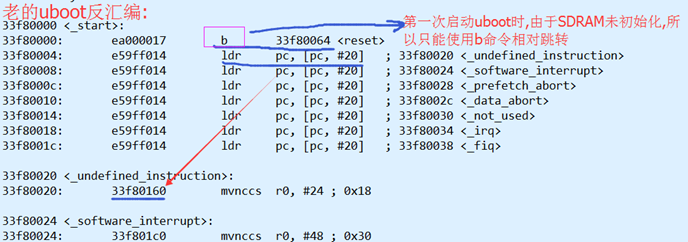
所以,新的uboot採用了動態鏈接地址的方法,在鏈接腳本uboot.lds中,可以看到這兩個段(.rel.dyn、.dynsym):

該兩個段里,便是保存了各個文件的相對動態信息(.rel.dyn)、動態鏈接地址的符號(.dynsym)
以上圖的.rel.dyn段為例來分析,找到__rel_dyn_start符號處:
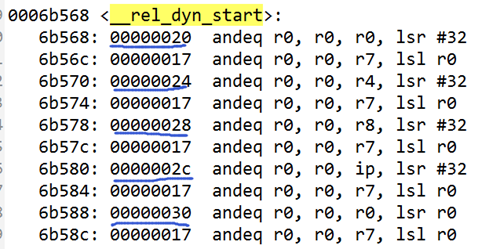
如上圖所示,其中0x17表示的是符號的結束標誌位,我們以0x20為例來講解:
在之前,我們講過0x20裡面保存的是異常向量0x04跳轉的地址(0x1e0),如下圖所示:
![]()
所以,接下來的代碼,便會根據0x20里的值0x1e0(flash地址),將SDRAM的33F41000+0x20的內容改為33F41000+0x1e0(SDRAM地址),來改變uboot的鏈接地址
2)重定位的剩餘代碼,如下所示:
#ifndef CONFIG_SPL_BUILD /* * fix .rel.dyn relocations */ ldr r0, _TEXT_BASE /* r0 <- Text base */ //r0=text段基地址=0 sub r9, r6, r0 /* r9 <- relocation offset */ //r9= 重定位後的偏移值=33F41000 ldr r10, _dynsym_start_ofs /* r10 <- sym table ofs */ //_dynsym_start_ofs =__dynsym_start - _start=0x73608 //所以r10=動態符號表的起始偏移值=0x73608 add r10, r10, r0 /* r10 <- sym table in FLASH */ //r10=flash上的動態符號表基地址=0x73608 ldr r2, _rel_dyn_start_ofs /* r2 <- rel dyn start ofs */ //r2=__rel_dyn_start - _start=0x6b568 //所以r2=相對動態信息的起始偏移值=0x6b568 add r2, r2, r0 /* r2 <- rel dyn start in FLASH */ //r2=flash上的相對動態信息基地址=0x6b568 ldr r3, _rel_dyn_end_ofs /* r3 <- rel dyn end ofs */ // _rel_dyn_end_ofs=__rel_dyn_end - _start=00073608 //所以r3=相對動態信息的結束偏移值=00073608
add r3, r3, r0 /* r3 <- rel dyn end in FLASH */ //r3=flash上的相對動態信息結束地址=0x6b568
fixloop: ldr r0, [r2] /* r0 <- location to fix up, IN FLASH! */ //以0x20為例,r0=0x6b568地址處的內容= 0x20 add r0, r0, r9 /* r0 <- location to fix up in RAM */ //r0=33F41000+0x20=33F41020 ldr r1, [r2, #4] //r1= 33F41024地址處的內容=0x17 and r7, r1, #0xff cmp r7, #23 /* relative fixup? */ //0x17=23,所以相等 beq fixrel //跳到:fixerl cmp r7, #2 /* absolute fixup? */ beq fixabs /* ignore unknown type of fixup */ b fixnext fixabs: /* absolute fix: set location to (offset) symbol value */ mov r1, r1, LSR #4 /* r1 <- symbol index in .dynsym */ add r1, r10, r1 /* r1 <- address of symbol in table */ ldr r1, [r1, #4] /* r1 <- symbol value */ add r1, r1, r9 /* r1 <- relocated sym addr */ b fixnext fixrel: /* relative fix: increase location by offset */ ldr r1, [r0] //r1=33F41020地址處的內容=0x1e0 add r1, r1, r9 //r1=0x1e0+33F41000= 33F411e0 fixnext: str r1, [r0] //改變鏈接地址里的內容, 33F41020=33F411e0 (之前為0x1e0) add r2, r2, #8 //r2等於下一個相對動態信息(0x24)的地址 cmp r2, r3 //若沒到尾部__rel_dyn_end,便繼續執行: fixloop blo fixloop #endif
9.清除bss段
/*重定位完成後,清除bss段*/ clear_bss: #ifndef CONFIG_SPL_BUILD ldr r0, _bss_start_ofs //獲取flash上的bss段起始位置 ldr r1, _bss_end_ofs //獲取flash上的bss段結束位置 mov r4, r6 /* reloc addr */ //獲取r6(SDRAM上的uboot基地址) add r0, r0, r4 //加上重定位偏移值,得到SDRAM上的bss段起始位置 add r1, r1, r4 //得到SDRAM上的bss段結束位置 mov r2, #0x00000000 /* clear*/ clbss_l: str r2, [r0] /* clear loop... */ //開始清除SDRAM上的bss段 add r0, r0, #4 cmp r0, r1 bne clbss_l bl coloured_LED_init bl red_led_on #endif
9.1繼續往下分析
#ifdef CONFIG_NAND_SPL //未定義,所以不執行 ... ... #else //執行else ldr r0, _board_init_r_ofs //r0=flash上的board_init_r()函數地址偏移值 adr r1, _start //0 add lr, r0, r1 //返回地址lr=flash上的board_init_r()函數 add lr, lr, r9 //加上重定位偏移值(r9)後,lr=SDRAM上的board_init_r()函數 /* setup parameters for board_init_r */ mov r0, r5 /* gd_t */ //r0=id值 mov r1, r6 /* dest_addr */ //r1=uboot重定位地址 /* jump to it ... */ mov pc, lr //跳轉: board_init_r()函數 _board_init_r_ofs: .word board_init_r - _start //獲取在flash上的board_init_r()函數地址偏移值 #endif
從上面代碼看出, 接下來便會進入uboot的board_init_r()函數,該函數會對各個外設初始化、環境變數初始化等.
uboot的啟動過程到此便結束了,下一章便來修改uboot,使它能夠運行起來

