
對於現代的智能手機來說,其內部要塞入太多各種不同介面的設備,給手機的設計 和元器件選擇帶來很大的難度。下圖是一個智能手機的例子,我們可以看到其內部存儲、顯示、攝像、聲音等內部介面都是各不相同的。即使以攝像頭介面來說,不 同的攝像頭模組廠商也可能會使用不同的介面形式,這給手機廠商設計手機和選擇器件帶來 ...
對於現代的智能手機來說,其內部要塞入太多各種不同介面的設備,給手機的設計 和元器件選擇帶來很大的難度。下圖是一個智能手機的例子,我們可以看到其內部存儲、顯示、攝像、聲音等內部介面都是各不相同的。即使以攝像頭介面來說,不 同的攝像頭模組廠商也可能會使用不同的介面形式,這給手機廠商設計手機和選擇器件帶來了很大的難度。
MIPI (Mobile Industry Processor Interface) 是2003年由ARM, Nokia, ST ,TI等公司成立的一個聯盟,目的是把手機內部的介面如攝像頭、顯示屏介面、射頻/基帶介面等標準化,從而減少手機設計的複雜程度和增加設計靈活性。 MIPI聯盟下麵有不同的WorkGroup,分別定義了一系列的手機內部介面標準,比如攝像頭介面CSI、顯示介面DSI、射頻介面DigRF、麥克風 /喇叭介面SLIMbus等。統一介面標準的好處是手機廠商根據需要可以從市面上靈活選擇不同的晶元和模組,更改設計和功能時更加快捷方便。下圖是按照 MIPI的規划下一代智能手機的內部架構。
1、MIPI優點:
MIPI優點:高速率:最多四個通道、每個通道最大為1GBps;
低功耗:LowPower:1.2V;
低成本:PIN腳更少,PCB占用成本更少;
抗干擾:高速傳輸信號200mV;
2、DSI規範:
2.1分層結構
DSI分四層,對應D-PHY、DSI、DCS規範、分層結構圖如下:

(備註:名詞解釋)
• DCS (DisplayCommandSet):DCS是一個標準化的命令集,用於命令模式的顯示模組。 • PHY 定義了傳輸媒介,輸入/輸出電路和和時鐘和信號機制。• Lane Management層:發送和收集數據流到每條lane。
• Low Level Protocol層:定義瞭如何組幀和解析以及錯誤檢測等。
• Application層:描述高層編碼和解析數據流。
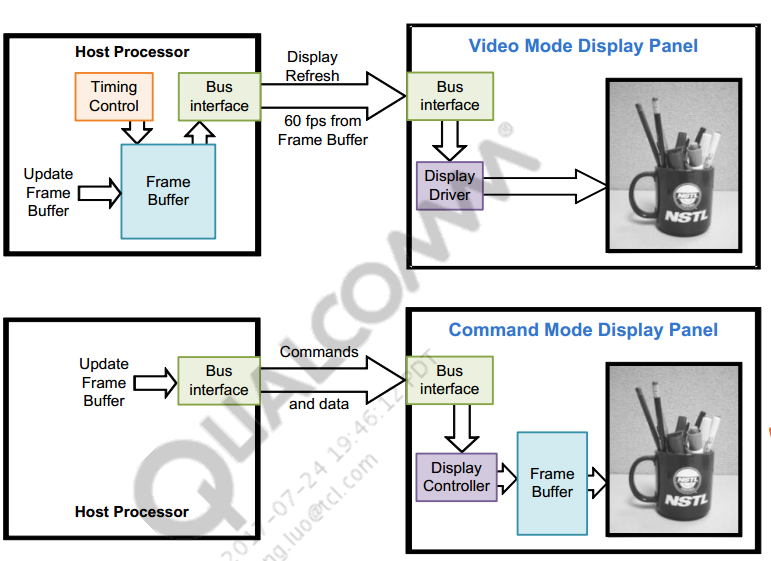
2.2 Command和Video模式:
• DSI相容的外設支持Command或Video操作模式,用哪個模式由外設的構架決定
• Command模式是指採用發送命令和數據到具有顯示緩存的控制器。主機通過命令間接的控制外設。Command模式採用雙向介面
• Video模式是指從主機傳輸到外設採用時實象素流。這種模式只能以高速傳輸。為減少複雜性和節約成本,只採用Video模式的系統可能只有一個單向數據路徑;
如圖所示:
3、D-PHY的模式:(物理層)
• DSI相容的外設支持Command或Video操作模式,用哪個模式由外設的構架決定
• Command模式是指採用發送命令和數據到具有顯示緩存的控制器。主機通過命令間接的控制外設。Command模式採用雙向介面
• Video模式是指從主機傳輸到外設採用時實象素流。這種模式只能以高速傳輸。為減少複雜性和節約成本,只採用Video模式的系統可能只有一個單向數據路徑
3.1 Lane模塊:
PHY由D-PHY(Lane模塊)組成;
D-PHY可能包含:
• 低功耗發送器(LP-TX) • 低功耗接收器(LP-RX) • 高速發送器(HS-TX) • 高速接收器(HS-RX) • 低功耗競爭檢測器(LP-CD) • 三個主要lane類型 • 單向時鐘Lane • Master:HS-TX, LP-TX • Slave:HS-RX, LP-RX • 單向數據Lane • Master:HS-TX, LP-TX • Slave:HS-RX, LP-RX • 雙向數據Lane• Master, Slave:HS-TX, LP-TX, HS-RX, LP-RX, LP-CD
3.2 操作模式:
數據Lane的三種操作模式:
• Escape mode, High-Speed(Burst) mode, Control mode
•從控制模式的停止狀態開始的可能事件有: • Escape mode request (LP-11→LP-10→LP-00→LP-01→LP-00) • High-Speed mode request (LP-11→LP-01→LP-00) • Turnaround request (LP-11→LP-10→LP-00→LP-10→LP-00) • Escape mode是數據Lane在LP狀態下的一種特殊操作 •在這種模式下,可以進入一些額外的功能:LPDT, ULPS, Trigger •數據Lane進入Escape mode模式通過LP-11→LP-10→LP-00→LP-01→LP-00 •一旦進入Escape mode模式,發送端必鬚髮送1個8-bit的命令來響應請求的動作 • Escape mode 使用Spaced-One-Hot Encoding 超低功耗狀態(Ultra-Low Power State)•這個狀態下,lines處於空狀態 (LP-00)
• 時鐘Lane的超低功耗狀態
•時鐘Lane通過LP-11→LP-10→LP-00進入ULPS狀態
•通過LP-10 → TWAKEUP →LP-11退出這種狀態,最小TWAKEUP時間為1ms • 高速數據傳輸
•發送高速串列數據的行為稱為高速數據傳輸或觸發(burst) •全部Lanes門同步開始,結束的時間可能不同。
•時鐘應該處於高速模式
• 各模操作式下的傳輸過程
•進入Escape模式的過程 :LP-11→LP-10→LP-00→LP-01→LP-00→Entry Code → LPD (10MHz)
•退出Escape模式的過程:LP-10→LP-11
•進入高速模式的過程:LP-11→LP-01→LP-00→SoT(00011101) → HSD (80Mbps ~ 1Gbps)
•退出高速模式的過程:EoT→LP-11
•控制模式 - BTA 傳輸過程:LP-11→LP-10→LP-00→LP-10→LP-00
•控制模式 - BTA 接收過程:LP-00→LP-10→LP-11
• 狀態轉換關係圖:

4、DSI介紹:(鏈路層)
4.1、DSI是一種Lane可擴展的介面,1個時鐘Lane/1-4個數據Lane;
DSI相容的外設支持1個或2個基本的操作模式:
• Command Mode(類似於MPU介面)
• Video Mode(類似於RGB介面)- 必須用高速模式傳輸數據,支持3種格式的數據傳輸
• 傳輸模式:
• 高速信號模式(High-Speed signaling mode)
• 低功耗信號模式(Low-Power signaling mode) - 只使用數據lane 0(時鐘是由DP,DN異或而來)。
• 幀類型
• 短幀:4 bytes (固定)
短幀結構:
• 幀頭部(4個位元組)
• 數據標識(DI) 1個位元組
• 幀數據- 2個位元組 (長度固定為2個位元組)
• 錯誤檢測(ECC) 1個位元組
• 幀大小
• 長度固定為4個位元組
• 長幀:6~65541 bytes (可變)
• 幀頭部(4個位元組)
• 數據標識(DI) 1個位元組
• 數據計數- 2個位元組 (數據填充的個數)
• 錯誤檢測(ECC) 1個位元組
•數據填充(0~65535 位元組)
• 長度=WC*位元組
• 幀尾:校驗和(2個位元組)
• 幀大小:
• 4 + (0~65535) + 2 = 6 ~ 65541 位元組
• 兩個數據Lane高速傳輸示例:

總結論:
• 傳輸模式和操作模式是不同的概念; • Video Mode操作模式下必須使用High-Speed的傳輸模式; • Command Mode操作模式並沒有規定使用High-Speed或Low Power的傳輸模式,或者說即使外部LCD模組為Video Mode,但通常在LCD模組初始化時還是使用Command Mode模式來讀寫寄存器,因為在低速下數據不容易出錯並且容易測量。 • Video Mode當然也可以用High-Speed的方式來發送指令,Command Mode操作模式也可以使用High-Speed,只是沒有必要這麼做。

