
說到redis的Dict(字典),雖說演算法上跟市面上一般的Dict實現沒有什麼區別,但是redis的Dict有2個特殊的地方那就是它的rehash(重新散列)和它的字典節點單向鏈表。 以下是dict用到的結構: 由於樓主演算法能力有限:所以對哈希演算法沒有太深的瞭解,所以在這裡演算法就不詳寫了,大家有興趣 ...
說到redis的Dict(字典),雖說演算法上跟市面上一般的Dict實現沒有什麼區別,但是redis的Dict有2個特殊的地方那就是它的rehash(重新散列)和它的字典節點單向鏈表。
以下是dict用到的結構:
typedef struct dictEntry {//字典的節點 void *key; union {//使用的聯合體 void *val; uint64_t u64;//這兩個參數很有用 int64_t s64; } v; struct dictEntry *next;//下一個節點指針 } dictEntry; typedef struct dictType { unsigned int (*hashFunction)(const void *key); //hash函數指針 void *(*keyDup)(void *privdata, const void *key); //鍵複製函數指針 void *(*valDup)(void *privdata, const void *obj); //值複製函數指針 int (*keyCompare)(void *privdata, const void *key1, const void *key2); //鍵比較函數指針 void (*keyDestructor)(void *privdata, void *key); //鍵構造函數指針 void (*valDestructor)(void *privdata, void *obj); //值構造函數指針 } dictType; /* This is our hash table structure. Every dictionary has two of this as we * implement incremental rehashing, for the old to the new table. */ typedef struct dictht { //字典hash table dictEntry **table;//可以看做字典數組,俗稱桶bucket unsigned long size; //指針數組的大小,即桶的層數 unsigned long sizemask; unsigned long used; //字典中當前的節點數目 } dictht; typedef struct dict { dictType *type; void *privdata; //私有數據 dictht ht[2]; //兩個hash table int rehashidx; /* rehashing not in progress if rehashidx == -1 */ //rehash 索引 int iterators; /* number of iterators currently running */ //當前該字典迭代器個數 } dict;
由於樓主演算法能力有限:所以對哈希演算法沒有太深的瞭解,所以在這裡演算法就不詳寫了,大家有興趣可以百度。
當運用哈希演算法計算出 k0的索引 ,redis就會插入到指定的位置

當k2和k1出現計算出鍵索引相同的情況下,這時候redis的dictEntry(字典節點)有一個next屬性(單項鏈表),redis會把衝突鍵索引的元素排到後插入數據的前面,從而解決了這個問題

現在如果在插入2條元素,此時數據量已經超過dict的負載了,redis就會啟用rehash,雖然是rehash操作但是redis是採用了漸進式操作,並不是一下子記憶體不夠用了 就直接操作記憶體,然後全部轉移數據,這樣會導致操作很耗時,redis考慮到了這一點,然後
先把ht[1]另一張dict結構中擴容一個數量為ht[0].used*2的dictEntry數組,然後把2條數據通過哈希演算法加入到這個數組中。
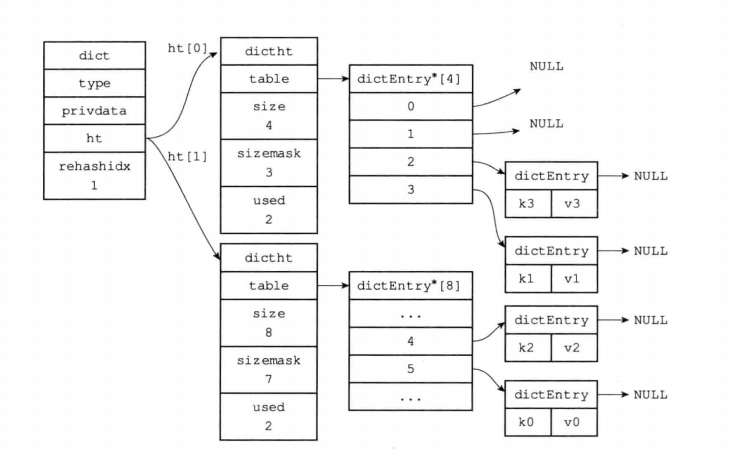
然後把上面的元素一個個非同步漸漸移動到下麵的數組中,在這個過程中如果客戶端去操作元素時,如果在ht[0]中檢查找不到建,就會去檢查ht[1]中是否有指定的鍵,從而不影響數據的使用,而且可以避免一次性操作rehash帶來的耗時問題,最後reshash完成了,就直接把ht[1]和ht[0]切換位置並且清空棄用的哈希節點數組,從而完成所有操作。




