
前言 本篇博客將會詳細介紹 CSAPP 之 ShellLab 的完成過程,實現一個簡易(lou)的 shell。tsh 擁有以下功能: 可以執行外部程式 支持四個內建命令,名稱和功能為: quit:退出終端 jobs:列出所有後臺作業 bg <job>:繼續在後臺運行一個處於停止狀態的後臺作業,<j ...
前言
本篇博客將會詳細介紹 CSAPP 之 ShellLab 的完成過程,實現一個簡易(lou)的 shell。tsh 擁有以下功能:
- 可以執行外部程式
- 支持四個內建命令,名稱和功能為:
quit:退出終端jobs:列出所有後臺作業bg <job>:繼續在後臺運行一個處於停止狀態的後臺作業,<job>可以是 PID 或者 %JID 形式fg <job>:將一個處於運行或者停止狀態的後臺作業轉移到前臺繼續運行
- 按下 ctrl + c 終止前臺作業
- 按下 ctrl + z 停止前臺作業
實驗材料中已經寫好了一些函數,只要求我們實現下列核心函數:
eval:解析並執行指令builtin_cmd:識別並執行內建指令do_bgfg:執行fg和bg指令waitfg:阻塞終端直至前臺任務完成sigchld_handler:捕獲SIGCHLD信號sigint_handler:捕獲SIGINT信號sigtstp_handler:捕獲SIGTSTP信號
下麵是具體實現過程。
實現過程
首先實現 eval 函數,由於 builtin_cmd 函數實現了內建指令的執行,所以 eval 裡面主要負責創建子進程來執行外部程式,並將子進程登記到 jobs 數組中。為了避免父子進程間的競爭引發的同步問題,需要在創建子進程前屏蔽掉 SIGCHLD 信號,由於子進程會複製父進程中的所有變數,所以子進程在執行外部程式之前應該解除屏蔽。同時 setpgid(0, 0) 使得子進程的進程組編號和不同於父進程 tsh,不然按下 ctrl + c 會直接退出終端。
void eval(char* cmdline) {
char* argv[MAXARGS];
pid_t pid;
sigset_t mask_all, mask_one, prev_mask;
sigfillset(&mask_all);
sigemptyset(&mask_one);
sigaddset(&mask_one, SIGCHLD);
int bg = parseline(cmdline, argv);
// 忽略空行
if (argv[0] == NULL)
return;
if (builtin_cmd(argv))
return;
sigprocmask(SIG_BLOCK, &mask_one, &prev_mask);
if ((pid = Fork()) == 0) {
sigprocmask(SIG_SETMASK, &prev_mask, NULL);
setpgid(0, 0);
Execve(argv[0], argv, environ);
}
sigprocmask(SIG_BLOCK, &mask_one, NULL);
addjob(jobs, pid, bg ? BG : FG, cmdline);
if (!bg) {
waitfg(pid);
} else {
printf("[%d] (%d) %s", pid2jid(pid), pid, cmdline);
}
sigprocmask(SIG_SETMASK, &prev_mask, NULL);
}
上述程式對 folk 和 execve 做了封裝,可以讓 eval 看起來更加簡潔,代碼如下所示:
pid_t Fork() {
pid_t pid = fork();
if (pid < 0)
unix_error("Fork error");
return pid;
}
int Execve(const char* __path, char* const* __argv, char* const* __envp) {
int result = execve(__path, __argv, __envp);
if (result < 0) {
printf("%s: Command not found\n", __argv[0]);
exit(1);
}
return result;
}
如果遇到前臺作業,終端應該調用 waitfg 函數並處於阻塞狀態,這裡使用 sigsuspend 函數而不使用 sleep 函數的原因是不好確定要 sleep 多長時間,間隔太短浪費處理器資源,間隔太長速度就太慢了:
void waitfg(pid_t pid) {
sigset_t mask;
sigemptyset(&mask);
while (fgpid(jobs)) {
sigsuspend(&mask);
}
}
builtin_cmd 的具體代碼如下所示,只要使用 strcmp 函數來比對指令就行了:
int builtin_cmd(char** argv) {
int is_buildin = 1;
if (!strcmp(argv[0], "quit")) {
exit(0);
} else if (!strcmp(argv[0], "fg") || !strcmp(argv[0], "bg")) {
do_bgfg(argv);
} else if (!strcmp(argv[0], "jobs")) {
listjobs(jobs);
} else {
is_buildin = 0;
}
return is_buildin; /* not a builtin command */
}
在 builtin_cmd 中最重要的就是 do_bgfg 函數,負責作業的狀態轉換,如下圖所示:

代碼如下所示,首先根據輸入的 ID 獲取作業,如果 ID 非法就提示錯誤信息,否則發送 SIGCONT 信號給進程組中的每一個進程,為了做到這一點,需要將 kill 函數的 pid 參數取負值,不然就只發給指定的進程了,顯然這不是我們想要的結果:
void do_bgfg(char** argv) {
char* cmd = argv[0];
char* id = argv[1];
struct job_t* job;
if (id == NULL) {
printf("%s command requires PID or %%jobid argument\n", cmd);
return;
}
// 根據 jid/pid 獲取作業
if (id[0] == '%') {
if ((job = getjobjid(jobs, atoi(id + 1))) == NULL) {
printf("%s: No such job\n", id);
return;
}
} else if (atoi(id) > 0) {
if ((job = getjobpid(jobs, atoi(id))) == NULL) {
printf("(%d): No such process\n", atoi(id));
return;
}
} else {
printf("%s: argument must be a PID or %%jobid\n", cmd);
return;
}
// 狀態轉移
if (!strcmp(cmd, "fg")) {
job->state = FG;
kill(-job->pid, SIGCONT);
waitfg(job->pid);
} else if (!strcmp(cmd, "bg")) {
job->state = BG;
kill(-job->pid, SIGCONT);
printf("[%d] (%d) %s", job->jid, job->pid, job->cmdline);
}
}
最後就是進行信號的處理了,由於同一種信號無法排隊,需要使用 while 來 waitpid,同時使用 WNOHANG | WUNTRACED 來處理終止和停止的情況。停止作業後需要修改 job 的狀態為 ST,不然 waitfg 中的迴圈會一直進行下去:
void sigchld_handler(int sig) {
int old_errno = errno;
pid_t pid;
int status;
sigset_t mask_all, prev_mask;
sigfillset(&mask_all);
while ((pid = waitpid(-1, &status, WNOHANG | WUNTRACED)) > 0) {
// 終止作業
if (WIFEXITED(status) || WIFSIGNALED(status)) {
sigprocmask(SIG_BLOCK, &mask_all, &prev_mask);
// ctrl-c 終止
if (WIFSIGNALED(status)) {
printf("Job [%d] (%d) terminated by signal 2\n", pid2jid(pid), pid);
}
deletejob(jobs, pid);
sigprocmask(SIG_SETMASK, &prev_mask, NULL);
}
// 停止作業
else if (WIFSTOPPED(status)) {
sigprocmask(SIG_BLOCK, &mask_all, &prev_mask);
struct job_t* job = getjobpid(jobs, pid);
job->state = ST;
printf("Job [%d] (%d) stopped by signal 20\n", job->jid, job->pid);
sigprocmask(SIG_SETMASK, &prev_mask, NULL);
}
}
errno = old_errno;
}
void sigint_handler(int sig) {
int old_errno = errno;
pid_t pid = fgpid(jobs);
if (pid > 0)
kill(-pid, SIGKILL);
errno = old_errno;
}
void sigtstp_handler(int sig) {
int old_errno = errno;
pid_t pid = fgpid(jobs);
if (pid > 0)
kill(-pid, SIGTSTP);
errno = old_errno;
}
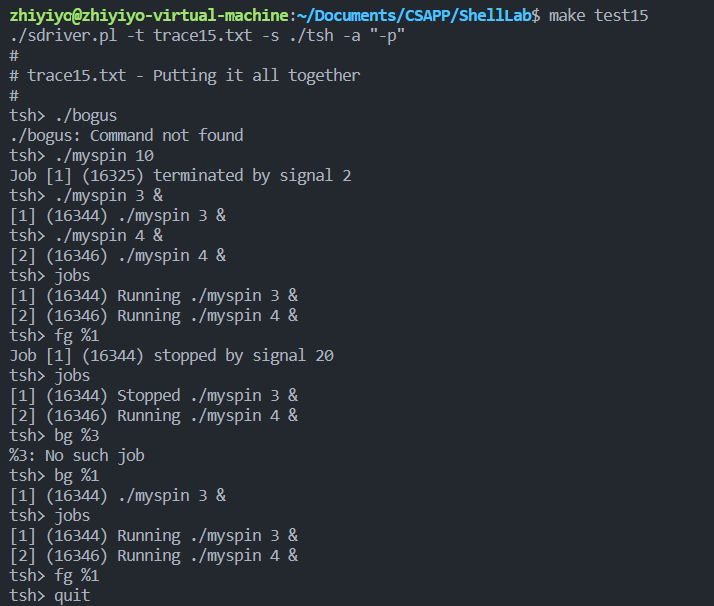
最後來測試一下 tsh 好不好使,這裡使用看起來最複雜的 trace15.txt:
總結
通過這次實驗,可以加深對進程式控制制和信號處理的理解,同時對於併發現象有了更直觀的認識,以上~~

