不同ubuntu版本對應的ros版本名稱 ubuntu版本 ros1版本 ros2版本 16.04 kinetic ardent 18.04 melodic dashing 20.04 noetic foxy 1、打開軟體與更新,切換ubuntu軟體源(國內阿裡雲) 2、打開終端,添加ros軟體源( ...
不同ubuntu版本對應的ros版本名稱
| ubuntu版本 | ros1版本 | ros2版本 |
| 16.04 | kinetic | ardent |
| 18.04 | melodic | dashing |
| 20.04 | noetic | foxy |
1、打開軟體與更新,切換ubuntu軟體源(國內阿裡雲)

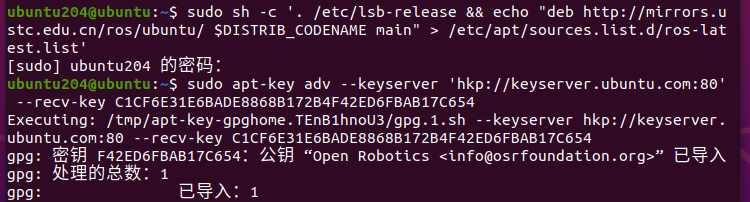
2、打開終端,添加ros軟體源(中科大鏡像站)
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
3、配置公鑰
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
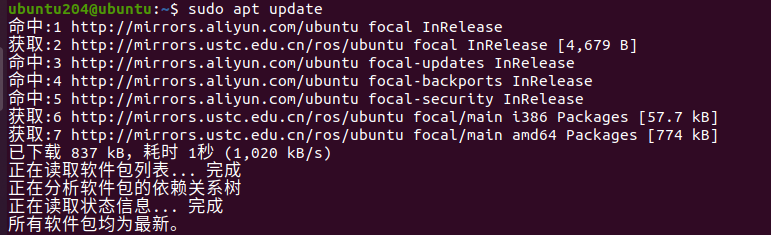
4、更新軟體源
sudo apt update
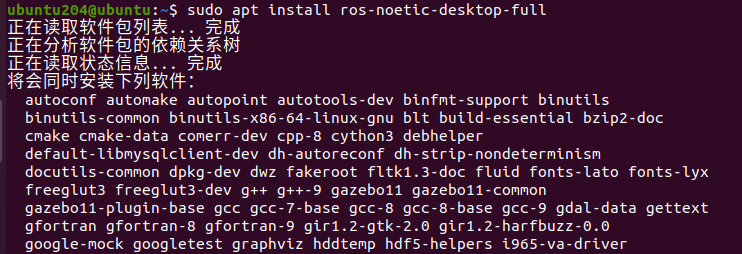
5、安裝ros系統(ps:命令中的noetic根據自己的ros版本名更換)
sudo apt install ros-noetic-desktop-full
6、初始化rosdep
sudo rosdep init
提示找不到rosdep命令

解決方法
sudo apt install python3-rosdep2
再次初始化rosdep
sudo rosdep init
提示不能從預設的來源列表下載

解決方法
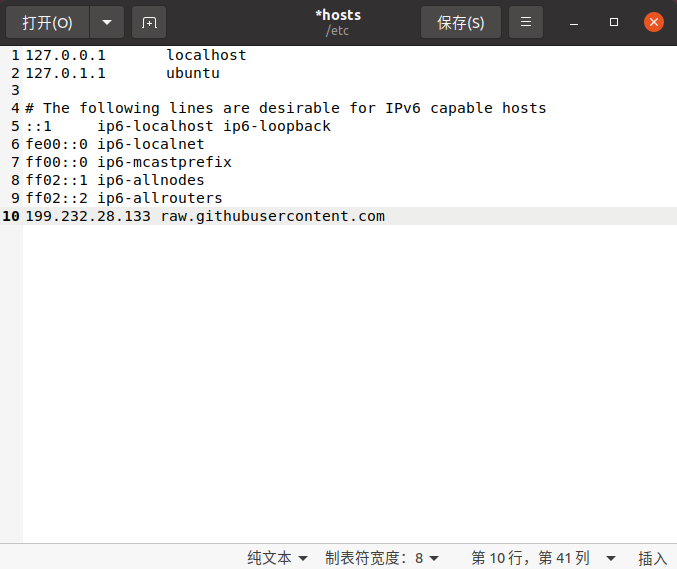
sudo gedit /etc/hosts
等自動打開hosts文件後,在文件中添加以下內容,然後保存並退出
199.232.28.133 raw.githubusercontent.com
再次初始化rosdep
sudo rosdep init

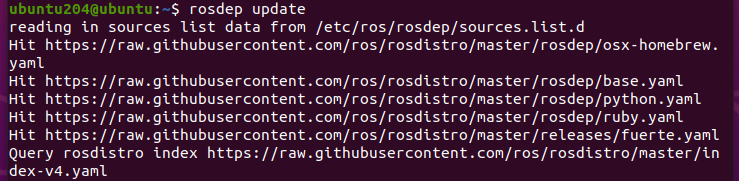
7、更新rosdep
rosdep update
8、設置環境變數(ps:命令中的noetic根據自己的ros版本名更換)
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc
9、使環境變數生效
source ~/.bashrc

10、安裝rosinstall
sudo apt install python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
11、安裝python3-roslaunch
sudo apt install python3-roslaunch

12、啟動ros系統
roscore
提示Usage is <1GB
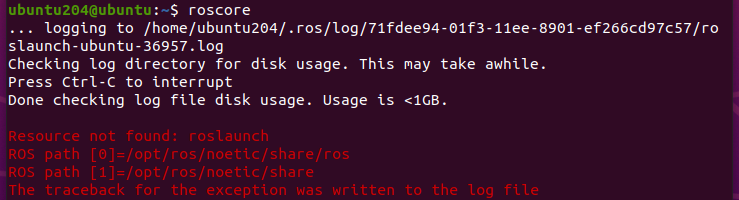
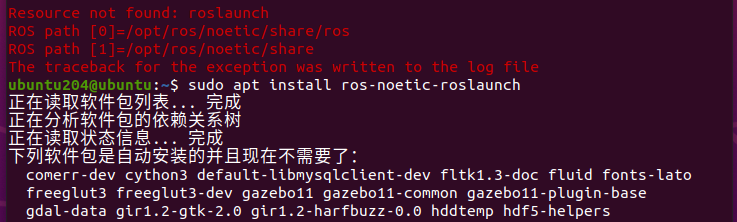
解決方法,安裝ros-noetic-roslaunch(ps:命令中的noetic根據自己的ros版本名更換)
sudo apt install ros-noetic-roslaunch
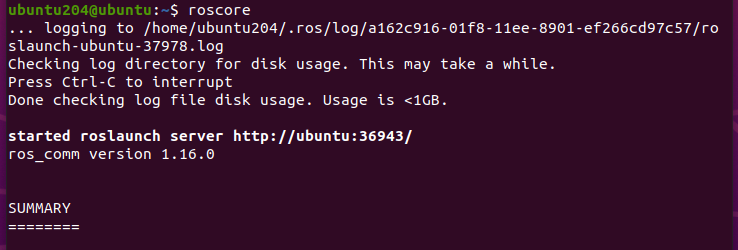
再次啟動ros系統,成功
roscore
13、不要關閉啟動ros那個終端視窗,另外再打開一個終端安裝ros-noetic-ros-tutorials(ps:命令中的noetic根據自己的ros版本名更換)
sudo apt-get install ros-noetic-ros-tutorials

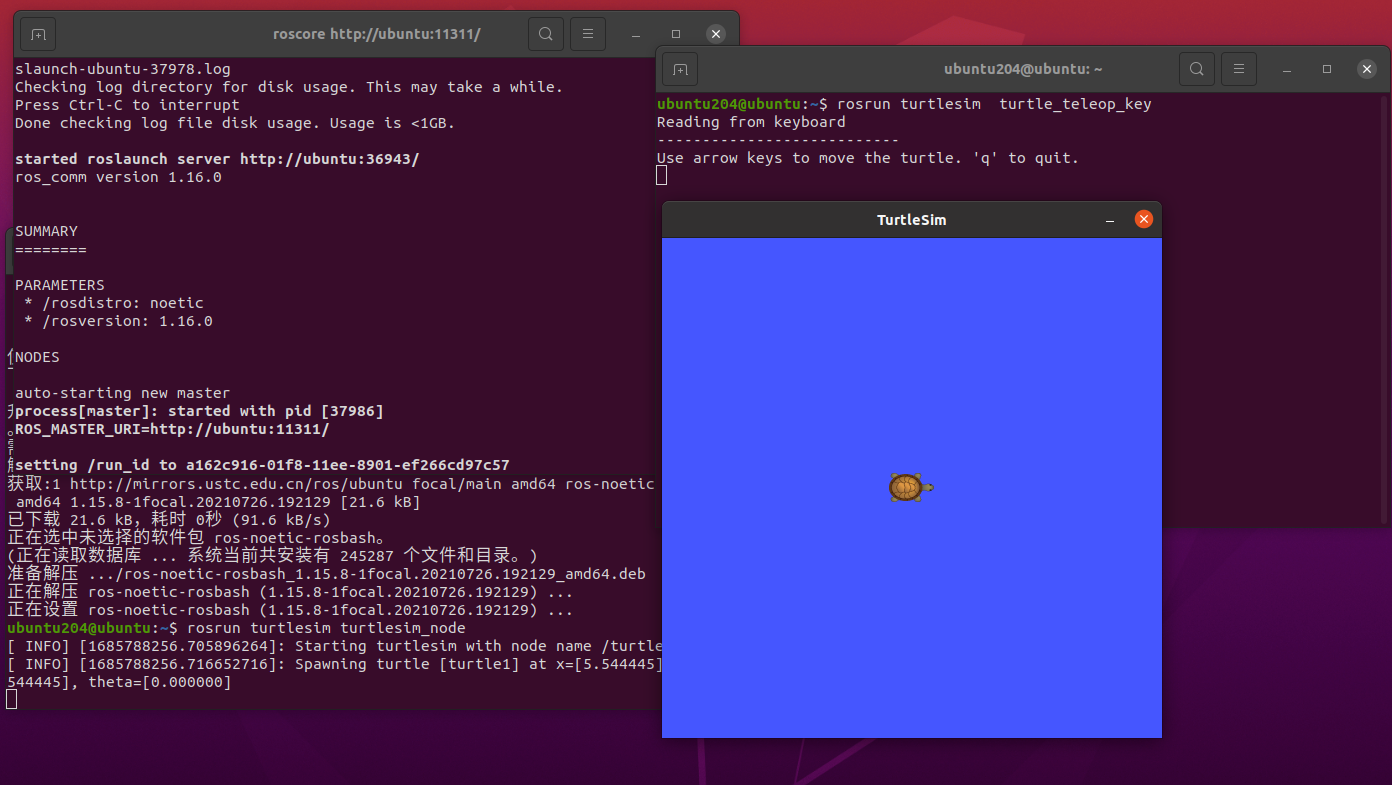
14、啟動小海龜模擬器
rosrun turtlesim turtlesim_node
提示找不到rosrun命令

解決方法,安裝ros-noetic-rosbash(ps:命令中的noetic根據自己的ros版本名更換)
sudo apt install ros-noetic-rosbash

再次啟動小海龜模擬器
rosrun turtlesim turtlesim_node

15、保留上面兩個終端視窗不關閉,另外再打開一個終端啟動小海龜控制節點
rosrun turtlesim turtle_teleop_key

最後效果圖(ps:有三個終端同時在運行)